
1 La généalogie des êtres artificiels : Des automates des origines à la robotique actuelle
Nicolas Reeves et David St-Onge ![]()
Table des matières
Une perspective industrielle : Entretien avec Charles Deguire, président et PDG de Kinova inc
1.6 Analogies anatomiques : la compréhension par la réplication
1.6.2 Le Canard Digérateur, l’écrivain, la musicienne et le dessinateur
1.6.3 Charles Babbage et le schisme robot-ordinateur
1.8.2 Les robots dans les arts et création-recherche
1.10 Les avenirs de la robotique et la transrobotique
1.1 Objectifs d’apprentissage
Appréhender les origines mythologiques des robots et automates contemporains
• Pouvoir lier les tendances actuelles en matière de robotique à l’histoire des êtres artificiels
• Comprendre le rôle de l’art, de l’artisanat et de la création dans l’évolution de la robotique contemporaine
1.2 Introduction
Ce chapitre constitue un aperçu détaillé de l’histoire des automates et de la robotique depuis la période hellénistique, qui a vu la naissance des sciences et technologies et durant laquelle ont vécu les fondateurs de l’ingénierie moderne, jusqu’à nos jours. La robotique contemporaine constitue une discipline récente. Au cours des 2000 ans qui nous ont précédés, des automates extrêmement sophistiqués et destinés à divers usages ont été conçus : divertir, impressionner ou émerveiller. Chacun d’entre eux était alors adapté aux circonstances ayant conduit à sa conception. Vous pourrez constater que les méthodes et techniques utilisées alors pour construire ces automates, et qui ont grandement contribué au développement de la robotique, étaient empruntées à des domaines inattendus : l’astronomie, la musique, le tissage, la bijouterie. L’impulsion qui poussait les créateurs d’automates à concevoir leurs êtres artificiels ne relevait ainsi pas d’une démarche rationnelle, mais plutôt du désir mythique ancestral de donner vie à des matériaux inertes.
1.3 Qu’est-ce qu’un robot?
Bien que chacun d’entre nous soit persuadé de savoir ce qu’est un robot, une étude plus précise du concept montrera qu’il n’est en fait pas si simple de déterminer une définition précise du terme, laquelle s’est encore élargie ces dernières années pour englober une large palette d’appareils. Le terme, lors de sa première apparition dans la pièce de théâtre tchèque R. U. R. (Karel Čapek, 1920), désignait des êtres humains créés artificiellement comme travailleurs serviles ultimes (Figure 1-1). Il englobe à présent une importante gamme d’appareils : bras robotique d’usine, jouet à pile pour enfant, androïde ou machine biomorphique. Le terme en est même arrivé à désigner les entités à la limite entre la technologie et la biologie qui ne peuvent plus vraiment être qualifiées d’artificielles.
Cette évolution est moins paradoxale qu’il n’y paraît. Contrairement à l’idée communément admise, les robots de Karel Čapek n’étaient pas des machines artificielles au sens strict, car créés à partir de matériaux organiques issus de processus chimiques. Dans le scénario de la pièce, l’objectif principal du projet consistait à construire des équipes de travailleurs dépourvus de tout élément non pertinent pour l’exécution de leurs tâches : les sentiments, les émotions, la sensibilité. Bien que leur façon d’être soit celle de robots, il s’agissait d’organismes de chair vivants, ce qui les différentiait des appareils technologiques hautement sophistiqués auxquels nous pensons lorsqu’il est question de robots contemporains. Il s’agissait plutôt d’automates, un mot que Karel Čapek avait en fait utilisé dans une pièce précédente, mais qu’il a remplacé par « robots » dans celle-ci.
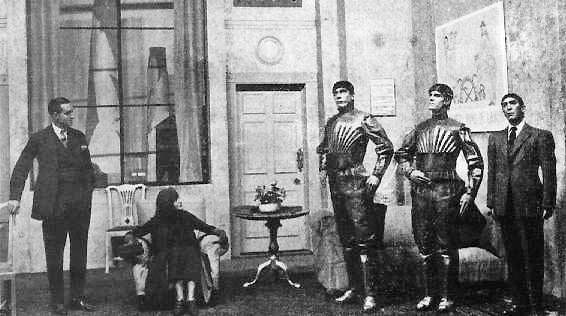
Figure 1‑1 : Scène de la pièce Rossumovi univerzální roboti (R. U. R.), de Karel Čapek, avec trois robots à droite, 1920
Il est intéressant de remarquer ce dernier point. À l’époque de l’écriture de R. U. R., le mot « robot » était un néologisme issu de racines slaves signifiant travail, corvées, servage. Rien dans sa signification d’origine ne laissait supposer qu’un robot soit une machine : un automate créé afin d’aider les êtres humains à accomplir une tâche a donc pris le nom de robot. Ainsi, cette signification est en contradiction avec le sens original du terme « automate » qui, d’un point de vue étymologique, renvoie à une machine animée agissant de son propre chef. Le mot est composé des racines grecques auto, qui signifie précisément « par soi-même » et dont l’origine, étrangement, est inconnue, et matos, « penser » ou « doué de volonté », elle-même issue du proto-indo-européen ancien *mens, « penser ». Ainsi, le terme désigne un être animé artificiel capable de prendre des décisions et d’agir de manière autonome, tandis que le mot « robot » est fréquemment associé à une machine conçue par un être humain dans le seul but d’accomplir aveuglément une série d’interactions, l’exact opposé d’une entité autonome. Il est toutefois peu contestable que chaque robot contemporain s’inscrive dans cette ancestrale généalogie d’automates. Il est également intéressant de remarquer que les origines les plus anciennes de la racine « rob » composant le mot « robot » évoquent le fait d’être orphelin, un reflet étrangement réaliste de la situation de ces êtres artificiels sans parents biologiques.
Depuis sa première apparition, le sens et la signification de « robot » se sont étendus bien au-delà de cette sombre étymologie. De nos jours, de nombreux robots sont créés pour la recherche, l’expérimentation ou le divertissement, sans utilité pratique. Les experts en robotique ne s’accordent toutefois pas sur une unique définition. Un consensus général est néanmoins atteint sur deux aspects : l’appareil doit être pourvu d’une forme d’intelligence et il doit posséder un corps. Toutefois, l’« intelligence » n’est pas une notion facile à définir en elle-même. Dans le présent contexte, il n’est pas question d’intelligence humaine ni de la perception habituelle de l’intelligence artificielle, mieux représentée par le concept d’apprentissage machine. L’intelligence, dans le cas d’un robot, ne concerne que la capacité de prendre une décision indépendante en se fondant sur les informations limitées apportées par le contexte ou des processus internes. L’étymologie est ici encore éclairante : le terme vient du latin inter ligere, « créer un lien entre ». Le lien peut être élémentaire (une butée touchant un mur fait s’arrêter les roues du robot) ou plus complexe (le robot prend une décision en comparant des renseignements issus de sources multiples). Le concept de corps fait référence à la physicalité du robot, par opposition à un « bot » dont l’existence est purement informatique. Dans son acceptation actuelle, le terme « automate », quant à lui, renvoie indifféremment à un dispositif physique ou informatique.
En ce qui concerne le présent chapitre, nous restreindrons la définition du mot « robot » aux automates physiques respectant deux critères : ils doivent être consacrés à l’exécution autonome de tâches de la catégorie 3D (Dangerous = dangereux, Dull = exigeant, Dirty = sale) ou à simplifier l’exécution de telles tâches par des êtres humains; ils doivent être capables de prendre des décisions par une forme quelconque d’interaction avec leur environnement. Comme nous allons le voir, cette définition a subi plusieurs variations au cours des dernières décennies, mais nous nous y tiendrons pour l’instant.
1.4 Une origine mythique
La généalogie des robots, tout comme l’histoire de la robotique, est intimement liée à celle des automates. Une description exhaustive de cette histoire dépasserait de loin la portée de ce chapitre, d’autant plus que plusieurs ouvrages ont déjà été écrits à ce sujet (notamment : Demson & Clason 2020; Mayor 2018; Nocks 2008;Foulkes 2017…) Toutefois, afin de saisir efficacement les fondements de la fascination humaine pour les robots et les systèmes robotiques ainsi que les motivations connexes, il est possible de résumer certaines étapes principales et de dater les bifurcations qui ont conduit à la séparation progressive entre les robots et les automates. L’évolution des tendances historiques en matière de robotique éclaire grandement la compréhension des raisons pour lesquelles certains aspects de la robotique sont mieux connus et développés que d’autres.
Le premier point à considérer, et probablement le plus important, est que la robotique ne tire pas ses origines de la technologie ou de la science, mais de croyances mythologiques s’étendant bien au-delà et pouvant être grossièrement divisées en deux couches. La première couche est constituée du mythe d’un être aux pouvoirs surnaturels et aux intentions imprévisibles, une image qui colle toujours à tout robot ou automate. La seconde couche comprend l’ensemble des tentatives effectuées dans l’histoire pour répliquer, au moyen de mécanismes artificiels, deux éléments naturels qui échappent encore et toujours à la compréhension humaine, à savoir la vie et les événements cosmiques.
Ces deux couches s’entrecroisent sur de nombreux plans, mais leurs intentions basiques diffèrent toutefois. La première est probablement à l’origine de tout automate humanoïde ou de forme animale. Elle a mené aux tentatives de création d’êtres aux pouvoirs supérieurs à ceux des êtres humains, des entités autonomes insensibles à la douleur, à la peur, à l’ennui ou à une quelconque émotion, au prix de toute forme d’empathie. Les contes, les récits de science-fiction, les films et les jeux vidéo regorgent d’exemples d’inventeurs ayant tenté de construire de telles entités, avec des intentions aussi diverses que la palette de sentiments humains : du désir d’aider et de protéger à la destruction et à la domination. Toutefois, après sa fabrication et en vertu de la volonté propre qu’il doit posséder, tout automate peut se révéler incontrôlable et imprévisible, même pour son créateur. La pièce de Karel Čapek illustre cet aspect, tout autant que les abondants récits sur le mythe juif du golem, dont la première mention peut être trouvée dans la littérature talmudique. Le golem, une créature artificielle composée de glaise, représente une forme de vie primitive créée dans le seul but d’aider ou de protéger son créateur. Il est à noter que, d’un point de vue historique, le golem constitue vraisemblablement la première entité répondant à la définition d’un robot, telle qu’énoncée plus haut : une entité artificielle construite spécifiquement pour accomplir une tâche ou remplir une fonction pratique.
En dépit de la nature hautement fonctionnelle et technologique de la plupart des systèmes robotiques contemporains, l’évolution des automates et l’émergence des robots ne peuvent être totalement comprises sans réaliser que la plupart d’entre eux sont issus de la volonté de simuler la vie, que les créateurs d’automates ont acquis des compétences poussées et employé de vastes quantités de temps et de ressources afin d’atteindre cet objectif de la manière la plus précise possible, et que, et c’est le plus important, tout automate porte en lui le rêve secret de son créateur de donner la vie à une créature inanimée, c’est ce que nous nommons l’« effet Gepetto » (Reeves 1992).
Les automates ont toujours été créés pour simuler. Leur objectif principal, et souvent unique, consistait à dissimuler leur véritable nature d’assemblages de matériaux inanimés et à donner l’illusion qu’ils agissaient de leur propre chef. L’apparition des premiers automates coïncide avec l’émergence d’une compréhension rudimentaire des principes de la physique, ce qui n’est pas fortuit. Étant donné que son accès était réservé à une portion réduite de la population, sa maîtrise relevait davantage de la magie pour les gens ordinaires. Bien que l’un des buts principaux de la toute jeune science grecque ait été d’expliquer les phénomènes naturels par des causes naturelles, et par la même occasion de s’affranchir des explications surnaturelles, ses pouvoirs ont pu être aisément confondus avec ceux des entités des mythes, contes et textes religieux. Plusieurs œuvres ont exploité ce sentiment dans le but de créer des appareils destinés à divertir ou à impressionner les foules en simulant l’intervention de forces surnaturelles. Il n’existait alors quasiment aucun automate construit dans un but pratique.
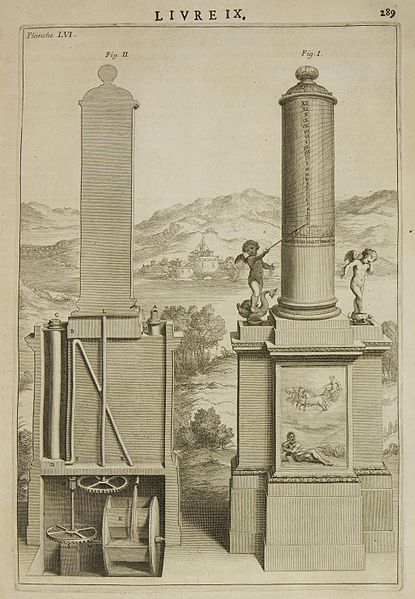
Figure 1‑2 : Clepsydre de Ctésibios, environ 250 av. J.-C., représentée dans la traduction française du traité de Claude Perrault de 1864 « Dix livres d’architecture de Vitruve »
Ce n’était pas toujours évident. À première vue, la clepsydre perpétuelle construite par Ctésibios d’Alexandrie (Figure 1-2), dont nous parlerons plus bas, pourrait être qualifiée de robot primordial, au vu de sa fonction de donner l’heure. Une clepsydre ordinaire ne peut pas être considérée comme un automate, il s’agit en fait d’un sablier utilisant de l’eau au lieu du sable, ne comportant aucune composante autonome. Toutefois, le dispositif de Ctésibios, construit trois siècles avant Jésus-Christ, était combiné à un mécanisme qui remplissait le réservoir chaque jour par de l’eau provenant d’une source et qui reconfigurait son état afin d’indiquer l’heure de chaque jour de l’année. Son autonomie complète lui confère le qualificatif d’automate. Son but pratique, sa forme d’intelligence lui permettant de réajuster le niveau d’eau de son réservoir et son existence physique pourraient lui donner le statut de premier robot de l’histoire au sens moderne du terme. Cette interprétation n’est toutefois valide qu’avec un regard contemporain. Comme la plupart des dispositifs destinés à mesurer le temps, la clepsydre de Ctésibios relevait davantage du modèle astronomique que de l’horloge : elle transposait les mouvements du Soleil en mécanisme autonome. Les automates humanoïdes et zoomorphes tentaient de décrire, de comprendre et de répliquer les fonctions et comportements des êtres vivants, tandis que les horloges, jusqu’au début de la révolution scientifique, étaient en majorité des modèles cosmiques destinées à traduire une compréhension partielle des mécanismes célestes[1].
Vitruve lui-même, en faisant référence à la clepsydre de Ctésibios dans le 10e livre de son traité De Architectura, ne lui attribue aucune fonction pratique. La conception et la construction de tels instruments exigeaient habituellement les meilleurs artisans et ouvriers de leur époque. Les défis technologiques que recèlent de tels mécanismes ont mené à l’élaboration de technologies et connaissances théoriques entièrement novatrices, tout en engloutissant des sommes considérables à la seule portée des plus riches. Ces machines sont devenues des symboles de prestige et témoignaient du niveau d’expertise atteint dans leur pays d’origine. Même de nos jours, il est tout sauf aisé de construire une horloge avec une longue période de révolution. L’horloge astronomique de la mairie de Copenhague a nécessité plus de quinze ans de conception et douze ans de construction. Achevée en 1955, son rouage le plus lent effectue un tour complet en 25 735 ans (Mortensen 1957)[2].
Ces exemples, et de nombreux autres, démontrent que la décision de créer un automate n’était pas à l’origine motivée par des considérations pratiques. Elle puisait sa source dans le désir mythologique d’appréhender certains des mécanismes les plus secrets à l’origine de la vie et des événements cosmiques, un désir à l’origine des évolutions majeures des sciences mécaniques et technologiques, en particulier celles qui ont mené à la robotique moderne. Pour pouvoir être qualifié d’automate, il ne suffit pas à un être artificiel d’être utile, il n’est même pas nécessaire qu’il puisse bouger ni faire quoi que ce soit. Il lui suffit de donner l’illusion satisfaisante de la vie (Reeves et St-Onge 2016).
Une perspective industrielle
Entretien avec Charles Deguire, président et PDG de Kinova inc.

J’aime à penser que je suis né entrepreneur. Mes deux parents étaient des entrepreneurs, certains membres de notre famille aussi, et dès le jour où j’ai dû décider ce que j’allais devenir, j’ai su quel chemin je voulais suivre. Mais comme dans toute analyse de rentabilisation, vous avez besoin de trouver LA bonne idée. Dans mon cas, elle faisait partie du décor de mon enfance… Quand j’étais plus jeune, trois de mes oncles souffraient de dystrophie musculaire; ils étaient tous en fauteuil roulant motorisé et la mobilité du haut de leur corps était très limitée. Les défis qu’ils ont dû relever ne les ont jamais arrêtés; ils ont même fondé une entreprise privée vouée au transport de personnes ayant des besoins particuliers. Ce concept a évolué pour devenir le système de transport adapté public de Montréal.
Un de mes oncles, Jacques Forest, ne pouvait bouger qu’un seul doigt. Il s’est lancé le défi de développer un bras qu’il pourrait contrôler par son doigt actif afin de retrouver une indépendance fonctionnelle et de pouvoir saisir et manipuler des objets de son environnement sans aide extérieure. Il a eu diverses idées techniques novatrices pour de tels appareils, fondées sur sa propre expérience et intuition. Le dispositif de préhension qu’il a réussi à construire était composé d’un abat-jour d’une lampe de bureau et se terminait par une pince à hot dog. Le manipulateur a été construit par tous les membres de la famille. Il a pu être mis en mouvement grâce à des câbles de bicyclette fixés à des moteurs d’essuie-glaces, assemblés sur du contreplaqué et situés à l’arrière de son fauteuil roulant. Les moteurs étaient actionnés au moyen de 14 interrupteurs électroniques qu’il commandait au moyen de son unique doigt mobile.
Tandis que j’étudiais pour devenir ingénieur, je suis tombé sur toutes sortes de nouvelles technologies, toutes plus extraordinaires les unes que les autres. Toutefois, je me suis rendu compte que le fait qu’un astronaute puisse effectuer des manipulations à distance avec un bras robotique spatial était aberrant, sachant que les personnes en fauteuil roulant ne pouvaient même pas se verser un verre d’eau seules. Comme je connaissais la réalité des personnes vivant avec des handicaps physiques, j’ai décidé de consacrer ma vie à la résolution de ces problèmes, en commençant par un appareil d’assistance robotisé que j’ai construit de A à Z, spécialement prévu pour les utilisateurs de fauteuils roulants.
Nous faisons passer les problèmes par un entonnoir. Nous commençons à les étudier de façon très large, un peu chaotique. Nous examinons la situation sous des angles internes et externes, selon la perspective de notre propre industrie et celle d’autres industries, et nous nous posons la question suivante : « Quel processus puis-je utiliser pour résoudre ce problème? » Une fois que nous avons sélectionné quelques approches qui, selon nous, ont du potentiel, nous approfondissons la question et nous concentrons vraiment sur la mise en œuvre de chacune d’entre elles.
Nous robotisons les tâches. Nous l’avons fait pour les personnes en fauteuil roulant, en améliorant leur portée. En chirurgie, nous augmentons les capacités du chirurgien. Dans le domaine de la manutention des matières dangereuses, nous avons robotisé la manipulation des déchets toxiques ou nucléaires. Mais le processus reste toujours le même, fournir de meilleurs outils aux humains.
La créativité est l’une des plus grandes ressources du Canada. C’est elle qui appuie la croissance de Kinova et propulse notre fabrication canadienne à l’échelle internationale.
1,5 Les premiers automates
Ctésibios est considéré comme le fondateur de l’école grecque de mécanique. Prenant la relève, quatre noms ressortent dans le domaine émergent des automates, tous issus de l’est de la Méditerranée : Philon de Byzance, Vitruve de Rome, Héron d’Alexandrie et, plus tard, Ismā’īl al-Jazari d’Anatolie. Il suffit d’observer quelques exemples de leur travail pour remarquer que le fait de travailler dans le domaine de l’illusion et de la simulation n’empêche pas la création d’un considérable corpus de connaissances sur le comportement des systèmes physiques réels, de concevoir d’immenses dispositifs dans leur région et de laisser des écrits qui sont devenus des sources d’inspiration majeures pour des générations d’ingénieurs et de scientifiques. Les machines et les automates qu’ils ont construits ne sont rien de moins que les merveilles technologiques de leur époque.
Philon de Byzance a vécu aux environs du troisième siècle avant Jésus Christ. Il a rédigé un grand nombre de traités qui illustrent très bien l’avancement technologique de son pays. Il a inventé une serveuse automatique destinée à servir de l’eau et du vin, considérée habituellement comme le premier robot humanoïde de l’Histoire. Environ trois siècles plus tard, l’ingénieur et mathématicien Héron d’Alexandrie a conçu une série d’environ 80 dispositifs mécaniques, l’un d’entre eux étant considéré comme la première machine à vapeur et d’autres utilisant exclusivement la force du vent. Ses recherches sont restées inconnues des érudits européens durant plus d’un millénaire. Il n’est également pas possible de déterminer avec certitude le nombre de ses inventions, la majeure partie d’entre elles ayant été détruites au cours de l’incendie de la bibliothèque d’Alexandrie. Il est même possible que certaines n’aient jamais vu le jour. Aucune de ses inventions n’avait pour but d’effectuer des tâches pratiques : il exploitait ses connaissances de la physique et des mathématiques (principalement de la géométrie) dans le but d’impressionner ou d’engendrer une fascination mythologique grâce aux mécanismes décrits dans ses traités Automata (Murphy 1995) et Pneumatica (Woodcroft 1851). Les portes d’un temple ne s’ouvrant après un sacrifice que si un feu était allumé dans un réceptacle par le visiteur constituent le premier exemple d’immotique. Le feu chauffait l’eau dans un réservoir dissimulé, la pression accumulée causait le transfert partiel de l’eau dans un second réservoir suspendu à un câble relié à un système de poulies fixées aux portes. Le poids accumulé dans ce second réservoir provoquait sa descente et l’ouverture des portes[3].
Héron a également conçu une immense statue de Dionysos (Figure 1-3, gauche) dans laquelle le passage de l’eau d’un réservoir à un autre provoquait une suite d’actions : du « vin » (de l’eau colorée en rouge) coulait du verre de Dionysos, du « lait » (de l’eau colorée en blanc) coulait de sa lance, la statue centrale de Dionysos tournait, la statue d’un ange passait par-dessus Dionysos et finalement du vin et du lait coulaient des sorties opposées. Certaines versions des plans et schémas en question comportent un groupe de danseurs en cercle autour de la statue principale ainsi qu’un feu allumé automatiquement par un système approprié. Un autre de ses traités, Dioptra (Coulton 2002), constitue la clé de la robotique moderne, décrivant plusieurs instruments destinés à des usages pratiques, comme la mesure de distances ou d’angles. Il s’agit notamment du premier odomètre, un dispositif qui comptait les rotations des roues d’un chariot. Il était étalonné en miles romains, une unité équivalant à 400 rotations d’une roue de 4 pieds. Une série de rouages ouvraient lentement un clapet qui libérait une bille par mile romain. Ce type de dispositif n’était évidemment ni un robot ni un automate, mais c’est l’idée de recueillir des renseignements à partir du monde extérieur au moyen d’un dispositif de mesure qui est à la source de la robotique moderne. Il est intéressant de noter que ce type de dispositif convertit en fait l’information d’un phénomène continu (la rotation d’une roue) en un phénomène discret (le nombre de billes). L’odomètre actuel effectue ses calculs à partir de codeurs optiques fixés aux roues motrices, mais le concept de la mesure est similaire à ce que Héron avait imaginé deux mille ans plus tôt.
Héron a également créé de toutes pièces un théâtre de marionnettes automatisé. Il s’agit d’un impressionnant exemple des compétences et connaissances technologiques mises en œuvre pour créer un dispositif destiné seulement au divertissement. Il s’agit également du premier exemple historique d’un mécanisme programmable. Les mouvements des marionnettes étaient contrôlés par des câbles et des roues selon une séquence préenregistrée. Ces dispositifs étaient activés par le mouvement de poids suspendus à un câble, tout comme les coucous allemands apparus deux millénaires plus tard. Tout programme informatique actuel utilisé pour n’importe quelle tâche imaginable est un descendant lointain de cette machine, construite dans l’unique but d’amuser ou de surprendre le public. Ce qui est encore plus surprenant, c’est que les efforts consacrés pendant des siècles à ce type d’objectif excèdent de loin ceux destinés à la création de robots utiles à des tâches pratiques, situation qui a perduré jusqu’au milieu du 20e siècle. C’est également cette volonté qui a mené à des réalisations intellectuelles et technologiques, parfois sans autre application pendant des périodes prolongées.
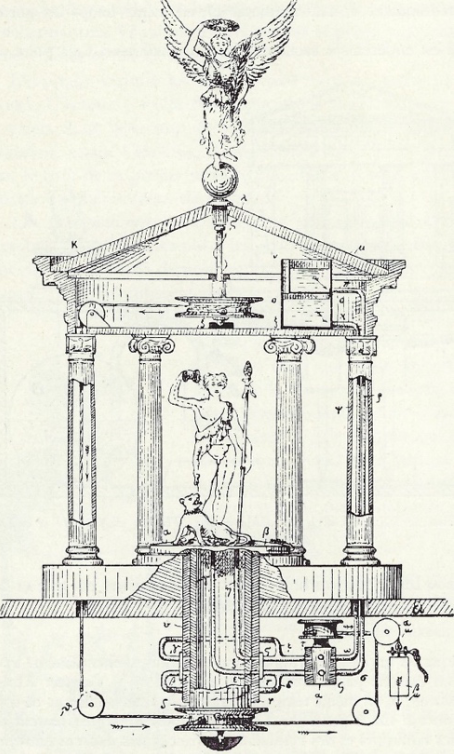
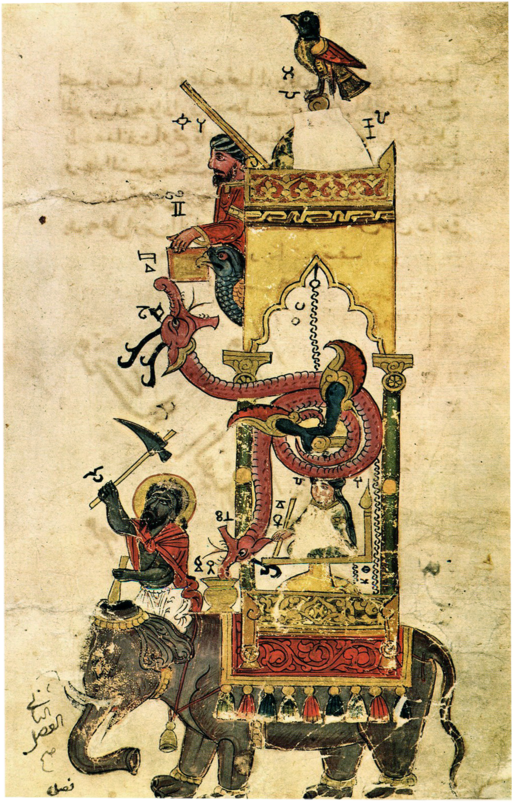
Figure 1‑3 : Schémas extraits des ouvrages de Chapuis, 1658, représentant des dispositifs de Dionysos par Héron d’Alexandrie, 1er siècle av. J.-C. (gauche) et Ismā’īl al-Jazari, 1206 (droite).
Environ dix siècles plus tard, Ismā’īl al-Jazari, ingénieur et mathématicien vivant en Anatolie, a obtenu de nombreux contrats auprès de plusieurs monarques. Il a ainsi été engagé pour inventer des appareils destinés à impressionner les foules au cours des parades publiques (Figure 1-3, droite). Grâce à un usage judicieux de systèmes hydrauliques, de leviers et de transferts de poids, il a conçu plus sieurs mécanismes composés de pièces mobiles autonomes. Dans son traité le plus célèbre, Livre de la connaissance des procédés mécaniques (Al-Jazari 1974), il détaille des systèmes allant d’un réveil hydraulique générant un léger son de flûte pour réveiller son propriétaire après une sieste à un instrument de musique à percussion à base de cylindres heurtant des leviers. Les cylindres pouvaient être modifiés afin de générer des séquences percussives différences. Il s’agit, dix siècles après les travaux de Héron, d’un autre exemple d’automate programmable.
Il est intéressant de remarquer que certains autres dispositifs, comme le calculateur astronomique du 2e siècle av. J.-C. nommé machine d’Anticythère, dont l’inventeur est inconnu, ont parfois été considérés comme des automates. Toutefois, selon les historiens et les érudits, ce dispositif était actionné par une manivelle et n’était donc pas autonome. Ces machines étaient toutefois liées aux premiers automates, en particulier aux premières horloges mécaniques apparues près de quinze siècles plus tard, en ce fait qu’elles constituent, tout comme les horloges mécaniques, des modèles réduits de systèmes planétaires, à la précision et à la qualité d’exécution remarquables pour l’époque.
1.6 Analogies anatomiques : la compréhension par la réplication
1.6.1 – Léonard de Vinci
Il est impossible de parler de l’histoire des automates sans mentionner Léonard de Vinci (1452-1519). Certains des travaux de cet artiste et inventeur visionnaire s’ancrent fortement dans cette fascination mythologique ancestrale pour la simulation des êtres humains. Afin de donner vie à ces visions, il a intensément étudié l’anatomie et les aspects cinématiques du corps humain. Il est cependant bien connu que son travail a touché à l’ensemble des disciplines existant à son époque. Il serait difficile de déterminer laquelle de ses réalisations a eu le plus d’influence sur les arts et sciences modernes. Ses inventions et traités pratiques sur les mécanismes ont engendré et accéléré la première révolution industrielle, plus de trois siècles plus tard. Son talent d’artisan légendaire lui a permis de créer des pièces et dispositifs, comme les têtes à engrenages et les poulies, qui sont toujours massivement fabriqués de nos jours en suivant les mêmes principes de conception, bien que des équipements industriels complexes aient aujourd’hui remplacé le travail d’artisanat.
Deux de ses inventions sont particulièrement liées à la robotique moderne : son chevalier mécanique et son chariot autopropulsé, parfois surnommé la Fiat de Léonard de Vinci qui constitue probablement le premier véhicule autonome de l’Histoire. Le chariot comportait un système de propulsion à entraînement différentiel et une direction programmable pour ses déplacements. Le mécanisme tout entier était supposément alimenté à l’origine par des ressorts comprimés. En 1997, les chercheurs ont compris que leur fonction réelle n’était pas de propulser le chariot, mais de réguler son mécanisme d’entraînement. En 2006, une première réplique fonctionnelle à l’échelle 1/3 a été construite à Florence. Toutes les tentatives précédentes avaient échoué du fait de ce malentendu (Gorvett 2016).
Le chevalier mécanique, quant à lui, est une machine complexe (Figure 1-4). Il comporte des dizaines de poulies et de rouages qui lui permettraient de s’asseoir, de se lever, de remuer ses bras et ses jambes. Il n’était toutefois pas en mesure de marcher. Ce n’est qu’en 2004 que le premier prototype a été construit. Il a permis de confirmer la faisabilité de toutes ces actions, ainsi que d’autres : mouvement de la mâchoire, rotation du cou, déplacement de la visière. Le chevalier de Léonard de Vinci, bien que toujours ancré dans la mythologie ancestrale des êtres artificiels et très en avance sur son temps, est lié à l’essence même des automates. Il constitue l’ancêtre de plusieurs humanoïdes récents, et il paraît que son influence a été importante sur la conception originale du robonaute de la NASA.
Il est pour l’instant impossible de dénombrer l’ensemble des réalisations de Léonard de Vinci en matière de robotique, notamment parce qu’un grand nombre d’entre elles ont été perdues au cours de l’Histoire. De plus, comme précisé plus haut, un certain nombre de ses conceptions sont incomplètes. Dans certains cas, des composantes principales de la machinerie ou nécessaires au fonctionnement manquent. Dans d’autres cas, comme avec le chariot, certaines conceptions sont trop complexes pour être totalement comprises à l’heure actuelle.

Figure 1‑4 : Automate humanoïde de Léonard de Vinci, environ 1495
1.6.2 – Le Canard Digérateur, l’écrivain, la musicienne et le dessinateur
Ces deux exemples démontrent que la volonté de simuler les êtres vivants est omniprésente dans l’histoire des automates et des robots. Toutes ces entités tentent de répliquer les caractéristiques principales de la vie et de produire, délibérément ou non, l’illusion d’avoir transcendé le néant de la matière inerte. L’énergie et les efforts investis pour créer cette illusion nécessitaient des technologies qui ne se contentaient pas d’être les plus avancées de leur temps, mais qui contribuaient également largement à leur propre évolution. Au-delà d’une simple simulation, l’automate tentait d’atteindre le statut de dispositif explicatif, infusé de vertus descriptives et permettant de dévoiler les secrets de la vie. C’est le cas du canard de Vaucanson, appelé canard digérateur par son inventeur, construit à la fin du 17e siècle (Figure 1-5). Selon les paroles de son inventeur (Vaucanson 1738) :
Toute la machine fonctionne sans y toucher après l’avoir réglée une fois. J’ai oublié de vous dire que l’animal boit, barbote dans l’eau, croasse comme le canard naturel. Finalement, j’ai tenté de lui faire reproduire tous les gestes de l’animal vivant, que j’ai étudiés avec attention.
Plus loin dans le même texte, Jacques Vaucanson mentionne la caractéristique la plus inattendue de son automate, à savoir sa capacité de digestion et de défécation :
Là, dans un petit espace, il a fallu construire un petit laboratoire chimique, pour en décomposer les principales parties intégrantes, et le faire sortir à volonté, par des circonvolutions de tuyaux, à une extrémité de son corps tout à l’opposé.
Il s’agit d’une simulation ingénieuse de la fonction excrétrice : seules de rares personnes prévoiraient cette fonction dans un but artistique ou pour faire illusion. L’idée même semble si excentrique qu’elle ne pourrait émerger, pour les observateurs, que de la volonté de créer une parfaite réplique d’un canard vivant, jusque dans ses moindres processus métaboliques. Certains ont eu l’impression à une époque que l’inventeur se rendait à l’idée qu’une simulation parfaite des organes de base tromperait la Vie elle-même, qui apparaîtrait alors spontanément dans l’entité. Le « petit laboratoire chimique » se veut l’équivalent d’un système digestif, décomposant la nourriture absorbée au niveau du bec en substances nutritives d’un côté et en substances inutiles évacuées par le cloaque de l’autre côté.
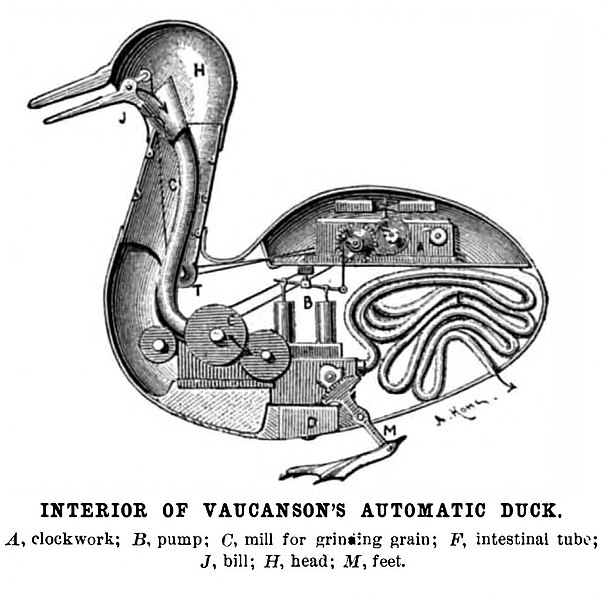
Figure 1‑5 : Le canard digérateur de Jacques Vaucanson, 1738. Cette image constitue une représentation fantaisiste publiée par le Scientific American magazine (1899). Très peu de représentations originales du canard de Vaucanson ont été retrouvées.
Comme on pouvait s’y attendre, il a été révélé plus tard que le canard de Vaucanson était une fraude. Quoi qu’il en soit, en suivant le modèle cartésien, qui considère l’Univers comme une horloge actionnée par un Grand Horloger et les êtres humains comme rien de plus que des machines sophistiquées, ce type de tentative démontre la tendance systématique à associer les organismes vivants aux technologies les plus avancées de l’époque[4].
Ces automates marquent également la lente évolution de l’évocation et de la simulation du vivant vers les flux et transferts d’information. À nouveau, cette séparation a été initiée par le modèle de l’être humain le plus communément admis à la fin du 17e siècle, modèle qui distinguait le corps (l’élément matériel) de l’âme (la force de contrôle et de prise de décisions). Descartes lui-même adhérait à cette dualité. Il est généralement admis que ce modèle machine-animal (Descartes 1637) a été conçu lorsque le scientifique a découvert l’existence d’un automate simple, une idée développée plus tard par le concept d’Homme Machine de Julien Offray de La Mettrie (La Mettrie 1748) : il pourrait s’agir d’un aperçu du processus par lequel un objet, initialement conçu comme une simple simulation réaliste d’un phénomène donné, peut devenir un modèle destiné à décrire et expliquer ce phénomène.
Le concept de l’Homme et de l’animal en tant que mécanismes sophistiqués a mené à la conception d’un nombre croissant d’automates élaborés, aux fonctions de plus en plus complexes. Environ un siècle après Descartes, les automates construits par la famille Jacquet-Droz ont initié la séparation entre matière et information (Figure 1-6). Ils étaient contrôlés par l’équivalent de programmes, des versions avancées de ceux créés par Ctésibios et Héron d’Alexandrie, codés dans des cylindres, des cames ou des disques et pouvant être changés, modifiant ainsi l’état interne des automates. Ils sont ainsi devenus indépendants de leurs composants mobiles physiques. Les changements de programmes ont ouvert tout un espace de possibilités, certes limitées, mais néanmoins réelles (Carrera R. et coll. 1979). L’un des automates en question, la musicienne, pouvait jouer cinq morceaux de musique. Le second, le dessinateur, pouvait dessiner quatre œuvres différentes. Le dernier, l’écrivain, était le plus complexe de tous. Il pouvait tracer quarante caractères différents, le texte à écrire étant codé sur des roues dentées, ce qui en faisait un automate entièrement programmable. Ces pièces technologiques délicates et impressionnantes font regretter la disparition presque complète de l’art de la création d’automates au 19e siècle. Heureusement, quelques artistes passionnés entretiennent la flamme de nos jours. Certaines de leurs œuvres, comme la Fée Ondine de François Junod, ne sont rien de moins que des pièces de joaillerie en mouvement. Comme on pourrait s’y attendre, le studio de François Junod se trouve non loin de la ville suisse de La-Chaux-de-Fonds, la toute première ville pensée pour les activités d’horlogerie.

Figure 1‑6 : Les automates de Jacquet-Droz : Le dessinateur, la musicienne, l’écrivain, 1767-1774
1.6.3 – Charles Babbage et le schisme robot-ordinateur
La rupture qui a fait de l’automate et de son programme de contrôle deux entités distinctes ne s’est pas produite à une seule occasion. Comme nous avons pu le constater, elle remonte aux dispositifs créés par les premiers ingénieurs grecs et l’automate percussif d’Ismā’īl al-Jazarī. D’autres étapes ont néanmoins été franchies par la suite et la voie vers la programmation informatique moderne est passée par les étapes musique et textile. Soixante-quinze ans après les automates de Jacquet-Droz, Henri Lecoultre a créé une boîte à musique pouvant jouer des mélodies préenregistrées sur des rouleaux interchangeables. Les orgues de Barbarie, apparus au 16e siècle, pouvaient jouer des mélodies préenregistrées sur des rouleaux, des disques, des cartes ou des rubans perforés, dont les trous permettaient de déterminer la mélodie à jouer. Ces instruments étaient alors appelés automatophones.
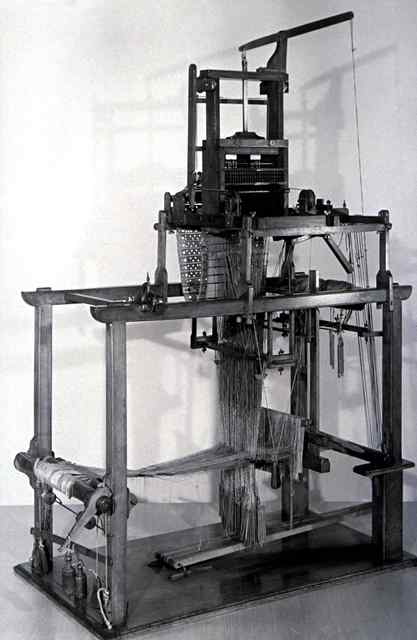
Figure 1‑7 : Un métier Jacquard, 1801
Ce principe a été presque immédiatement transposé par Basile Bouchon, fils d’un fabricant d’orgues, et son assistant Jean-Baptiste Falcon (Figure 1-7) afin de créer le premier métier Jacquard. Ils ont adapté les mécanismes des boîtes à musique de sa manufacture afin de créer les lecteurs de cartes qui contrôlaient les motifs à tisser (Eymard 1863). Il est intéressant de noter que le métier Jacquard utilisait également les cylindres conçus par Jacques Vaucanson, ce qui montre à nouveau que les technologies nécessaires à la mise en œuvre de machines pour un usage pratique trouvent souvent leur origine dans l’univers artistique. Ces technologies étaient alors élaborées avec des motivations complètement différentes à l’esprit.
Le système des cartes perforées a perduré pendant plus de deux siècles. On y a massivement eu recours pour la programmation des premières générations d’ordinateurs. Ce système a joué un rôle majeur dans le projet Manhattan, qui a permis la conception de la première bombe atomique, établissant un lien à la fois pervers et singulier entre la mélodie délicate des boîtes à musique, les motifs élégants d’un tissu de coton et la symphonie apocalyptique d’une explosion nucléaire. C’est également en observant le métier Jacquard que Charles Babbage a eu l’idée de concevoir sa machine analytique, considérée aujourd’hui comme le premier véritable ordinateur de l’Histoire (Figure 1-8). Cet énorme dispositif comportait tous les éléments principaux d’un ordinateur moderne : un élément d’entrée qui séparait les données des instructions, grâce à deux lecteurs de cartes perforées; un « pilote » mécanique qui préparait et organisait les données en vue de leur traitement; un « moulin » composé de centaines de rouages qui effectuait les opérations (l’équivalent mécanique d’un processeur); une « mémoire » qui stockait les résultats intermédiaires et finaux et un dispositif de sortie sous la forme d’une imprimante.
La machine analytique n’a jamais été achevée pour cause de problèmes de financement et de précision de fabrication. Elle reste toutefois, avec le métier Jacquard, le premier exemple d’appareil séparant complètement et intégralement le flux d’information de l’unité de traitement physique. Elle est également remarquable pour une autre raison : Ada Lovelace, fille du poète Byron, était fascinée par les mathématiques. Elle a rédigé le premier algorithme mathématique connu à destination de la machine de Charles Babbage, une séquence d’instruction permettant de calculer les nombres de Bernoulli[5], faisant d’elle la première programmatrice de l’Histoire. Sa clairvoyance et sa contribution étaient réellement visionnaires. Elle avait conjecturé la possibilité que de telles machines effectuent non seulement des opérations mathématiques, mais également du calcul symbolique, puis de les utiliser pour associer des lettres et des signes afin d’obtenir des résultats n’ayant rien à voir avec les mathématiques, comme composer des morceaux de musique. Cette nouvelle circonvolution permettrait de reconnecter la machine avec ses origines de boîte à musique (Lovelace 1843). Il s’agit également de la première évocation connue d’une forme de créativité artificielle, caractéristique qui, probablement plus que pour tout autre automate, témoigne du désir de rapprocher les machines des êtres humains. L’art était alors considéré comme la prérogative exclusive des êtres humains, idée qui reste prépondérante de nos jours. La question des relations entre les arts, les robots et les automates sera abordée plus en détail dans la section 6.2.
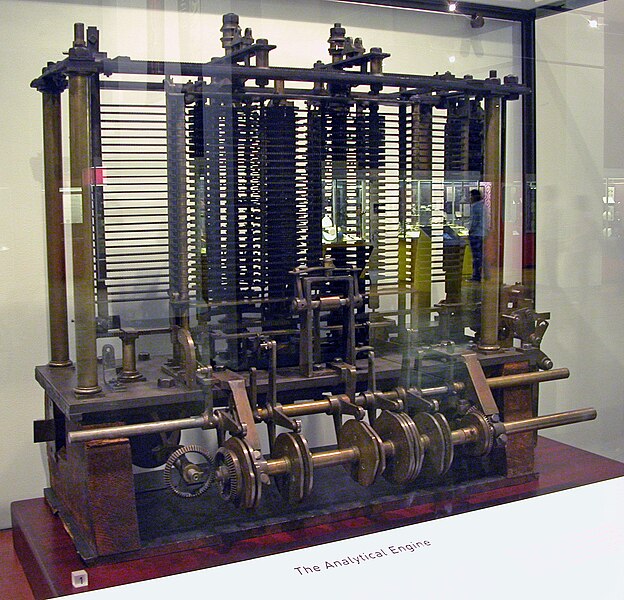
Figure 1‑8 : Prototype incomplet de la machine analytique de Charles Babbage, présentée au London Museum of Science; 1871
1.7 Révolutions industrielles
Les progrès technologiques se sont accélérés au cours des deux derniers siècles écoulés, alors que l’Occident connaissait des « révolutions industrielles ». La forme plurielle est utilisée ici, car au moins quatre révolutions ont été observées (Marr 2016). Le premier changement majeur a eu lieu à la découverte de l’énergie motrice de la vapeur et de l’eau. Le deuxième coïncide avec l’émergence de la production de masse et de la division du travail, ainsi qu’avec la découverte de l’énergie électrique. Le troisième a eu lieu à la fin des années soixante, avec l’automatisation de la production et le développement exponentiel de l’informatique et de l’électronique. Le quatrième, également appelé « révolution numérique », est le résultat de la fusion des technologies rompant la limite entre les sphères numérique, physique et biologique. Le champ d’application de cette dernière révolution est souvent appelé « industrie 4.0 ».
La première révolution industrielle représente la mise en place directe, à plus grande échelle, de plusieurs contributions précoces mentionnées plus haut, tout en restant ancrée dans de nombreux travaux de Léonard de Vinci. C’est seulement au cours de la troisième révolution industrielle que les premiers systèmes robotiques (automates industriels) ont été largement diffusés, bien que la deuxième révolution industrielle ait bien évidemment préparé le terrain en amont. Cette troisième révolution a tiré parti des découvertes et avancées de divers inventeurs, dont le célèbre Nikola Tesla. C’est au cours de la troisième révolution industrielle que le domaine de la robotique s’est affranchi de la lignée principale des automates. Pour la première fois, des entités artificielles douées d’une certaine autonomie ont été mises au travail, ne devenant rien de plus que des serviteurs ou esclaves automatisés, immunisés contre toute forme de fatigue, de danger pour la santé et probablement plus durables que des travailleurs humains. Il ne sera pas question de la quatrième révolution industrielle dans cet ouvrage, car l’histoire des changements qu’elle apporte reste à écrire. Il y sera toutefois fait référence dans la dernière section de ce chapitre.
Le développement des robots industriels au cours du 20e siècle a nécessité plusieurs avancées scientifiques, tant sur le plan de l’énergie (électrique, pneumatique, hydraulique), que sur celui du transport d’énergie et de la télémanipulation (contrôle à distance). Nikola Tesla [1856-1943] était un ingénieur et inventeur qui se qualifiait lui-même de « découvreur ». Il a surmonté la plupart des contraintes et trouvé des solutions à la majorité des exigences de la troisième révolution industrielle. Ses quelque trois cents brevets font de lui l’un des inventeurs les plus prolifiques de son époque. Ses contributions aux solutions de transport d’électricité et à la compréhension du courant alternatif l’ont rendu célèbre. Ces travaux ont bien évidemment entraîné des répercussions majeures sur le domaine de la robotique, mais nous nous concentrerons ici sur ses contributions en matière d’usage d’ondes radio.
En novembre 1898, Nikola Tesla a démontré qu’un petit bateau autonome pouvait être contrôlé à distance, jusqu’à plusieurs mètres. (Figure 1-9). Les instructions étaient envoyées par des pulsations codées d’ondes électromagnétiques. À la demande de son auditoire, il ordonnait à son bateau de tourner à droite, à gauche ou de s’arrêter. Ceci a constitué la première exposition d’un véhicule contrôlé à distance. Il ne s’agissait alors pas d’un robot au sens strict, mais, selon son inventeur, d’« emprunter l’esprit » de l’opérateur humain afin que des versions futures et plus avancées puissent remplir des missions de concert. Plusieurs brevets, comme celui concernant une transmission multibande sans fil « individualisée » (protégée) avancée, a suivi cette démonstration. Un autre brevet était lié au premier circuit « ET », un dispositif qui combinait deux fréquences radio afin de minimiser le risque d’interférences.
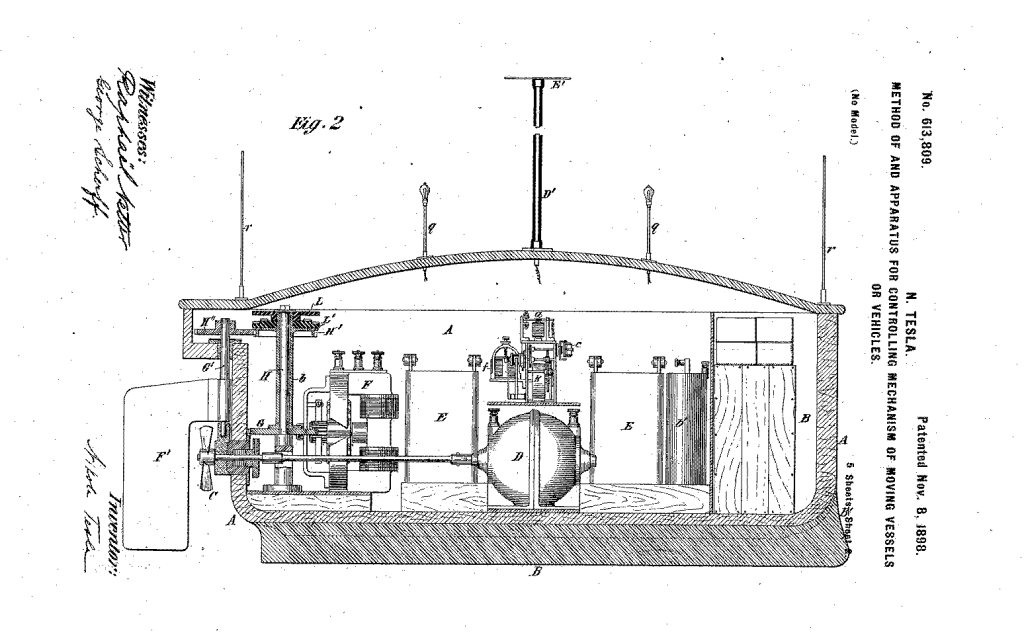
Figure 1‑9 : Plan du vaisseau contrôlé par radio de Nikola Tesla, extrait du brevet américain no 613809Al, 1898
Le bateau de Tesla ne serait guère plus qu’un jouet aujourd’hui. À l’époque toutefois, il s’agissait du précurseur de tous les appareils et systèmes contrôlés à distance. L’inventeur a tenté de rédiger une liste de toutes les applications potentielles de ce dispositif. En la parcourant, il est difficile de ne pas considérer son auteur comme relativement optimiste, notamment en matière d’applications militaires :
Des vaisseaux ou véhicules de tout type approprié peuvent être utilisés, des canots de sauvetage, des vedettes, des pilotines ou autres, pour transporter des lettres, des paquets, des provisions, des instruments, des objets, des matériaux de toute sorte, pour établir des communications avec des régions inaccessibles et déterminer les conditions régnant au sein de ces dernières, pour tuer ou capturer des baleines ou d’autres animaux des mers, ainsi que pour de nombreux autres objectifs scientifiques, d’ingénierie ou commerciaux. La plus grande valeur de mon invention réside cependant dans ses effets militaires et sur l’armement. Ainsi, du fait de son pouvoir de destruction certain et illimité, elle tendra à assurer une paix permanente entre les nations.
Comme c’est le cas pour toute découverte technologique, il n’a pas fallu longtemps aux militaires pour entrevoir une utilisation profitable de cette invention. Ils ont ainsi massivement financé la recherche sur les technologies connexes et rapidement déployé des équipements contrôlés à distance sur les théâtres d’opérations, sans pour autant, comme on pouvait s’y attendre, contribuer le moins du monde à une quelconque pacification des zones de conflit. Comme Nikola Tesla l’avait prédit en son temps, les recherches et découvertes en robotique les plus avancées restent financées par l’industrie militaire, et c’est cette dernière qui déploie ces technologies en premier. Bien loin de son origine mythologique et poétique, la robotique s’est transformée en quelques décennies en un domaine consistant à créer de puissantes machines de guerre.
Néanmoins, bien que la plupart des résultats des travaux menés dans cette sphère ne soient pas accessibles au public, certaines initiatives contribuent à l’avancement général du domaine. De nos jours, l’United States Defence Advanced Research Projects Agency (DARPA) organise plusieurs défis de robotique : des courses de véhicules autonomes (2004-2007), des interventions d’urgence humanoïdes (2012-2015), des tactiques d’essaims robotiques hétérogènes (2019-2022) et de l’exploration souterraine (2018-2021). Certains concurrents de ces défis reçoivent des millions de dollars en bourses par la DARPA afin de repousser les limites de leurs recherches.
En ce qui concerne l’univers industriel, la production de masse apparue au cours de la troisième révolution industrielle a mené à la multiplication des tâches répétitives dans la production manufacturière. La plupart de ces tâches convenaient parfaitement à de simples automates résistants. Les années soixante ont ainsi connu la naissance du premier bras robotique, Unimate (Figure 1-10), conçu par Georges Evol. Même s’il était possible de trouver sur le marché des versions précoces d’interrupteurs numériques (tubes électroniques) et de codeurs numériques, aucune pièce disponible dans le commerce n’était compatible. Toutes les pièces de la première série d’Unimates ont donc été conçues spécialement. Ce robot a été déployé dans les usines de General Motors en 1961 et a été l’objet de la première étude de marché, d’intégration, d’ergonomie et de sécurité de robots industriels effectuée directement sur site.
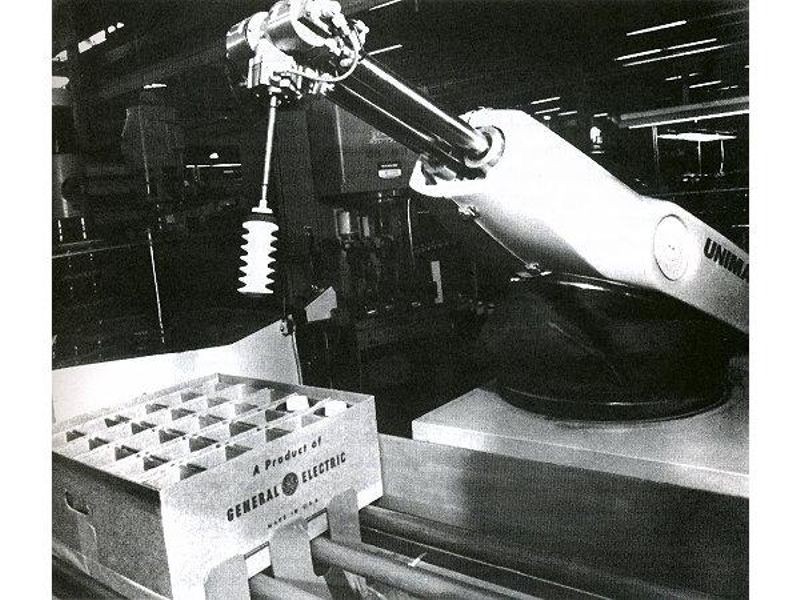
Figure 1‑10 : Bras robotique Unimate déployé dans l’usine de General Motors
pour manipuler et placer des pièces lourdes, 1963
Plusieurs leçons ont été tirées de cette étude, dont deux en particulier se sont révélées essentielles. Tout d’abord, l’obsolescence risque de se produire bien avant l’usure complète de la machine. Ceci a permis de conclure que la durée de vie d’un robot industriel dépend de sa robustesse (sa capacité à rester en bon état) tout autant que de sa versatilité (sa capacité à évoluer pour s’adapter à de nouvelles tâches). Ensuite, la complexité d’un robot est telle qu’il devient difficile de garantir sa fiabilité, caractéristique qui dépend des compétences de programmeur de son propriétaire, du système de production où le robot est intégré et de la qualité de son entretien. Il est toutefois important de remarquer qu’au bout d’environ une décennie d’utilisation d’Unimate, plusieurs propriétaires ont constaté que le gain économique du remplacement de la main-d’œuvre par des robots n’était pas significatif. Ils ont toutefois persisté avec la mécanisation en raison de la diminution des accidents industriels et des problèmes de santé des travailleurs.
L’Unimate se déplaçait selon six axes, l’un d’entre eux étant prismatique (translation), et pouvait porter jusqu’à 225 kg. Le premier bras mécanique a été vendu à perte, mais au bout de six ans, l’entreprise nommée Unimation Inc. a commencé à engranger des profits. Elle a plus tard changé de nom pour Staubli. D’autres entreprises se sont ensuite lancées sur ce marché, notamment ASEA et sa série IRB (pour Industrial Robot, robot industriel). Le premier IRB commercialisé, l’IRB6, se déplaçait selon cinq axes et pouvait porter des charges de six kilogrammes. ASEA s’est concentrée sur la facilité d’intégration de son produit, d’une masse totale de 112 kg et dont les systèmes électroniques de contrôle, notamment des actionneurs linéaires, étaient entièrement intégrés dans sa structure. L’entreprise a par la suite fusionné avec Brown, Boveri & Cie pour devenir ABB, un concurrent de Staubli dans la course visant à devenir l’un des plus importants fabricants de bras robotiques au monde[6].
1.8 La robotique moderne
Au cours des dernières décennies, alors que l’industrie tentait de robotiser les processus manufacturiers en divers endroits, d’énormes progrès ont été accomplis en matière de conception de systèmes robotiques, en cinématique, en systèmes de capteurs et de contrôle. L’ensemble de connaissances sur les systèmes robotiques avancés issu de ces avancées constitue le fondement de la robotique moderne, un domaine qui étudie la possibilité de déployer des robots fiables dans des environnements dynamiques inconnus. L’un des phénomènes les plus significatifs de cette période est assurément la convergence progressive entre les systèmes robotiques et biologiques depuis la fin des années 70, époque à partir de laquelle les tentatives ancestrales de simuler la vie par des analogies formelles ont laissé la place à de nouvelles expériences tentant de reproduire les aspects dynamiques de processus biologiques.
1.8.1 Surmonter l’inconnu
Effectuer des tâches ou missions complexes de manière autonome dans un environnement inconnu et changeant nécessite des systèmes avancés de perception, de prise de décision et un contrôle du mouvement agile. Toutes ces caractéristiques sont très présentes dans la nature. C’est pourquoi le vivant est rapidement devenu une source d’inspiration pour les roboticiens. De nombreux prototypes construits en 1948 par William Grey Walter, un neurophysiologiste fasciné par la complexité des comportements nouvellement observés des systèmes biologiques simples, préfigurent les premiers robots entièrement autonomes. Le scientifique était convaincu de la transposabilité de telles stratégies dans le domaine de la robotique grâce à des dispositifs élémentaires. Afin de prouver cette hypothèse, il a conçu un robot roulant en forme de tricycle capable de détecter directement la lumière au moyen d’un capteur à photodiode frontal, sans aucune programmation (Figure 1-11, droite). Une simple logique électronique permettait ensuite de tourner les roues pour diriger la machine vers la source de lumière la plus intense de son environnement. Cette instruction très simple donnait lieu à un comportement émergent, un comportement qui n’était ni prévu ni programmé et qui permettait à la machine d’éviter les obstacles de manière autonome. Les comportements émergents constituent l’une des caractéristiques essentielles des êtres vivants. Lorsque le niveau de batterie diminuait, le comportement du robot changeait : il recherchait l’endroit le plus sombre autour des alentours, comme pour s’enterrer dans son antre. La carapace protectrice autour des robots de William Grey Walter, ainsi que leur faible vélocité, a conduit les gens à les baptiser tortues. Ce nom a été conservé par le roboticien, probablement parce que, dans Alice au pays des merveilles, les tortues sont de sages professeurs.
Il est intéressant de constater que les relations des roboticiens avec les tortues dépassent de loin les prototypes de William Grey Walter. Dans les années soixante, une nouvelle technique d’enseignement, nommée Logo, a été élaborée. Elle se fondait sur les recherches récentes en matière de cognition et d’apprentissage et a été intégrée dans des langages de programmation. C’est l’une de ces intégrations qui a fait entrer Logo dans l’histoire : une méthode conçue pour enseigner les bases de la pensée et de la programmation procédurales aux enfants. Ces derniers apprenaient soit en faisant bouger une icône de tortue sur l’écran d’un moniteur, soit en faisant de même avec une tortue-robot sur le sol. Logo est resté l’un des seuls ensembles d’outils destinés à l’enseignement de la pensée et de la programmation procédurales jusqu’à la fin des années 90, tant dans les écoles primaires que secondaires.
 |
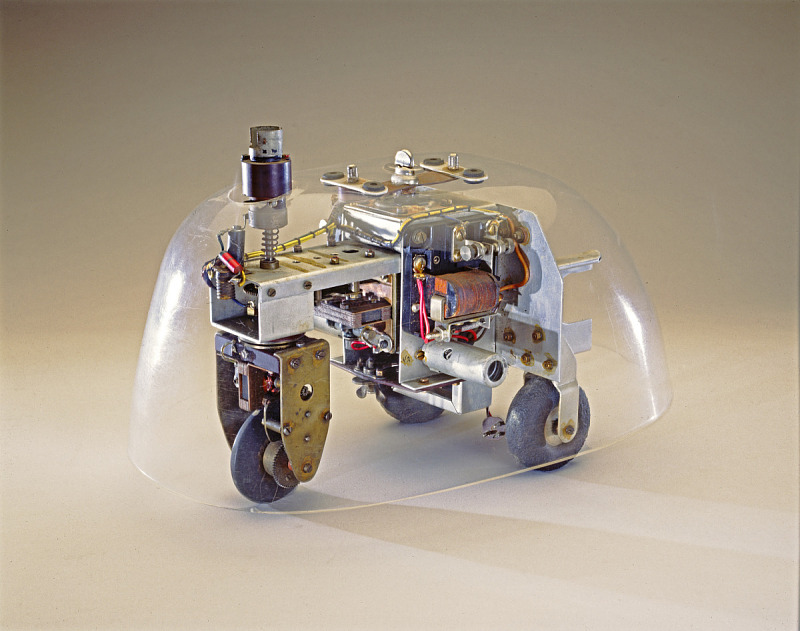 |
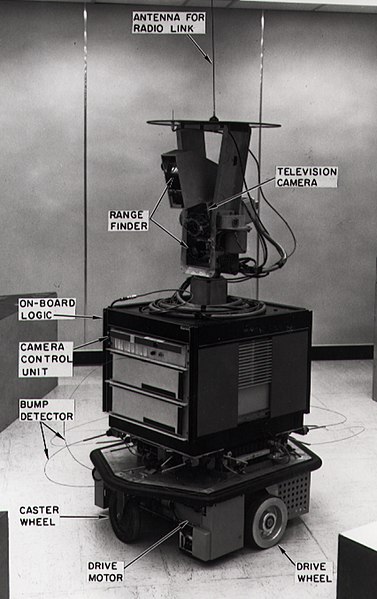
Figure 1‑11 : (gauche) Shakey le robot de Stanford, environ 1960; (droite) Tortue de Walter (1948-1949).
Les tortues de Walter ont inspiré de nombreux autres ouvrages de robotique. Vingt ans plus tard, en 2010, deux employés du Willow Garage, Tully Foote et Melonee Wise, ont commencé à travailler sur la nouvelle caméra Kinect de Microsoft dans le but de l’intégrer à une plate-forme iRobot Create[7]. Le résultat a été un robot abordable, facile à utiliser, idéal pour l’enseignement et la formation, qu’ils ont nommé « TurtleBot ». Sa popularité est intimement entrecroisée avec celle du Robotic Operating System, ou ROS (qui sera évoqué dans le chapitre 5). L’une des conclusions majeures de ces expériences est que des plates-formes souffrant de limitations importantes de leurs capacités sensorielles et de calcul peuvent développer des comportements complexes à l’image des insectes (fourmis, abeilles, termites, etc.), des oiseaux et des poissons, et en particulier, ceux de sociétés animales où le groupe s’associe pour mener à bien des tâches qui ne seraient pas à la portée d’un seul individu. Ces constatations ont préparé la voie au domaine de la robotique en essaim, évoqué au chapitre 11.
Les tortues artificielles tirant toutes leurs informations de la lumière, elles sont devenues extrêmement sensibles à l’étalonnage de leurs capteurs et à leur environnement. Elles nécessitaient donc un environnement extrêmement contrôlé pour atteindre leur rendement optimal. Le robot, nommé Shakey, conçu à l’Université de Stanford a permis de grandes avancées en matière d’exploration dans des environnements inconnus (1966-1972). Shakey (Figure 1-11, gauche) était le premier robot capable de raisonner au sujet de ses propres actions : il pouvait prendre des décisions en fonction de la combinaison de données obtenues grâce à plusieurs capteurs afin d’accomplir une tâche donnée (explorer, pousser un objet, se rendre à un endroit…). La plate-forme en elle-même consistait en un véhicule à entraînement différentiel équipé de caméras, de télémètres, de codeurs et de détecteurs de chocs. L’ordinateur qui lui servait de « cerveau » était un SDS-940 qui occupait toute une salle, et il communiquait avec grâce à une liaison radio. Le système de vision de Shakey pouvait détecter et suivre les plinthes, ce qui lui permettait de se déplacer sur un large secteur dédié. Le travail avec Shakey a permis aux chercheurs d’apporter des contributions essentielles aux domaines, comme l’algorithme de planification de parcours A* et le graphe de visibilité, tous deux évoqués au chapitre 8, ainsi que la transformée de Hough en matière de vision artificielle.
Juste après Shakey, la contribution de Stanford à la robotique moderne s’est poursuivie avec un nouveau véhicule autonome, appelé Stanford Cart (1973-1979). Conçu à l’origine à l’image d’un rover lunaire contrôlé depuis la Terre, ce qui implique un délai de 2,6 secondes de transmission des instructions, il est rapidement devenu évident que ces contraintes ne laissaient que deux choix possibles : se déplacer très lentement ou rendre le déplacement et la navigation autonomes. Afin de détecter les obstacles, le Cart a été équipé du premier système de stéréovision (imagerie 3D). Afin de planifier adéquatement son parcours, le robot devait effectuer une pause de quinze minutes après chaque mètre parcouru afin de balayer les alentours. En 1979, grâce à cette stratégie, le rover a pu traverser sans encombre, en cinq heures, une salle remplie de chaises sans aucune collision.
Ces robots et de nombreux autres non présentés ici ont constitué des jalons majeurs dans l’histoire récente de la technologie. Au contraire de la plupart des automates dont ils descendent, ils ont la possibilité de se déplacer par eux-mêmes et d’ajuster leur état interne et leur comportement en fonction des données transmises par leurs capteurs, ce qui constitue une forme élémentaire d’extéroception. Les recherches effectuées sur ces dispositifs ont directement mené à l’acquisition des connaissances actuelles en matière de véhicules autonomes et de drones. Toutes ces technologies préparent la voie aux robots de service qui sont utilisés en dehors de la sphère industrielle et en mesure de s’adapter à des environnements dynamiques inconnus et complexes.
1.8.2 Les robots dans les arts et création-recherche
Il est aisé de deviner que la recherche en robotique est particulièrement active. Les arts robotiques, bien que plus confidentiels, constituent également un domaine extrêmement dynamique. Comme pour la plupart des avancées technologiques, il n’a pas fallu longtemps aux artistes pour tirer parti des nouveaux outils, connaissances et méthodes issus de ce champ de recherche en évolution rapide. Cela ne devrait pas être surprenant, car comme nous l’avons vu, les automates de toutes sortes ont toujours entretenu une relation intime avec les arts. Les scientifiques et les ingénieurs se sont toujours davantage préoccupés de comment construire les robots, tandis que les artistes et les chercheurs en sciences humaines se demandaient plutôt pourquoi les créer. Un grand nombre de leurs travaux nous invitent à évaluer les risques, les dangers et les possibilités liés à l’émergence de machines de plus en plus sophistiquées. Vous pourrez constater que la frontière entre recherche et création est parfois poreuse, voire floue, lorsqu’il est question de création robotique. Ce nouveau champ, la création-recherche, à l’exacte intersection entre arts, science et technologie, a mené à la création d’œuvres robotiques conduisant à l’acquisition de nouvelles connaissances et à des évolutions technologiques novatrices dans ces trois domaines.
Tout comme l’art de la création d’automates, les arts robotiques ne consistent pas à fabriquer des robots à visée pratique. Ils ont toutefois donné naissance à de nombreuses avancées et découvertes dans les domaines de la mécanique, de la mécatronique et de la programmation. Ces progrès découlent des mêmes désirs qui ont poussé en leur temps la famille Jacquet-Droz à construire leur écrivain et leur musicienne, ou Jacques Vaucanson à créer son canard, le tout grâce à un usage judicieux des technologies les plus avancées de leur époque. De surcroît, la rengaine souvent citée affirmant que les premiers artistes en robotique jouaient avec leurs créations au lieu de travailler à les rendre utiles devrait être considérée comme positive et non péjorative : la recherche, dans quelque domaine que ce soit, reste avant tout une activité ludique, propulsée par la curiosité et le désir de découverte au cœur de la nature humaine.
Les artistes ne peuvent pas s’appuyer, comme les scientifiques, sur des infrastructures de recherche établies et n’ont pas accès aux mêmes ressources humaines ou matérielles. En contrepartie, ils profitent d’une grande liberté de recherche et d’action qui ne serait pas admise dans un environnement universitaire. N’étant limités par aucune contrainte de calendrier, tendance en matière de recherche ou besoin industriel, les artistes en robotique sont libres d’explorer des voies de recherche inattendues. Libérés de l’influence de leurs pairs qui les pousseraient à se concentrer sur les technologies de pointe, ils peuvent se consacrer à des dispositifs plus simples en suivant leurs propres motivations, rendant leur travail aussi particulier qu’unique. Ce phénomène a deux conséquences. Tout d’abord, des personnes à l’expertise technologique, aux moyens et aux ressources limités, parfois en suivant le mouvement de l’arte povera, ont obtenu des résultats majeurs. Ceci démontre, si cela s’avérait encore nécessaire, que des avancées essentielles peuvent provenir des dispositifs les plus élémentaires[8]. Ensuite, l’association d’artistes avec des chercheurs universitaires ou des partenaires industriels a le potentiel d’engendrer des résultats auxquels des artistes ou des chercheurs seuls ne pourraient prétendre.
Un coup d’œil aux œuvres du domaine démontre que les arts robotiques sont hybrides par nature. Des humanoïdes artificiels apparaissent dans les pièces de théâtre et les spectacles depuis les années 1920. Ils étaient la plupart du temps contrôlés à distance et ne disposaient donc d’aucune autonomie. Il est communément admis de nos jours que les robots d’art doivent être en mesure d’interagir d’une manière ou d’une autre avec l’auditoire ou son environnement ainsi que d’adapter leur comportement au contexte dans lequel ils sont présentés.
Le concept même d’interaction est en fait lié à un dialogue potentiel avec une entité artificielle. Le dialogue en question dépend des éléments utilisés par le robot pour communiquer. C’est pourquoi les arts robotiques ont également joué un rôle important dans le développement d’interfaces humain-robot intuitives. La première œuvre d’art robotique contrôlée par ordinateur a été le Senster (Benthall 1971). Il disposait d’une interface qui lui conférait un comportement pseudohumain, en ce sens qu’il était attiré par les mouvements et les sons doux, mais repoussé par les gestes brusques et les sons forts. La portée et les technologies nécessaires pour atteindre cette prouesse technique (microphones, radars Doppler, vérins hydrauliques, mémoire P9201 8K de Phillips, dont le prix à l’époque dépassait celui d’un appartement de trois chambres à Londres) rendaient son acquisition impossible par un artiste indépendant. Il s’agissait en fait d’une commande de Phillips.
Le Senster, dont l’aspect rappelait une girafe à trois jambes de quatre mètres et dont les mouvements dérivaient de ceux d’un homard, peut être considéré comme un pionnier dans le domaine de la création-recherche : l’objectif principal de sa conception était artistique, mais sa construction a nécessité une collaboration avec des experts issus de différents domaines et disciplines. Sa capacité à réagir à l’ambiance générale de son environnement générait en retour des émotions chez les personnes qui interagissait avec lui. Il paraissait inquiet lorsque son environnement s’agitait trop ou devenait bruyant, ce qui incitait les gens à agir de manière à « le calmer » ou au contraire à « l’inquiéter davantage ». Cette attitude empathique a également été observée avec de nombreuses autres œuvres conçues précisément pour la provoquer. La famille des Hysterical Machines de Bill Vorn consistait en des robots mécaniques en forme de pieuvre suspendus au plafond. Lorsque les visiteurs s’en approchaient trop, ils s’agitaient fortement, montrant même des signes de panique par des effets de lumière rapides et des mouvements effrénés de leurs tentacules métalliques. Confrontés à de telles réactions, la plupart des observateurs éprouvaient de la sympathie pour ces machines et reculaient pour les calmer (Vorn 2010). Le projet Aerostabiles de Reeves et St-Onge était composé de grands cubes robotiques lévitant dans de grands espaces intérieurs (Reeves et St-Onge 2016). Ils se maintenaient en l’air au moyen de capteurs, d’actionneurs et de propulseurs carénés (Figure 1-12). Un micro-ordinateur réajustait leur position en continu, provoquant de lentes oscillations. En dépit de leur apparence de haute technologie, très éloignée de celle de tout être vivant, ils instillaient des émotions intenses chez les spectateurs, leurs mouvements très doux étant interprétés comme une forme d’hésitation ou de respiration. Certains visiteurs les considéraient comme de grands animaux flottants, en quelque sorte prisonniers de leur enveloppe technologique.
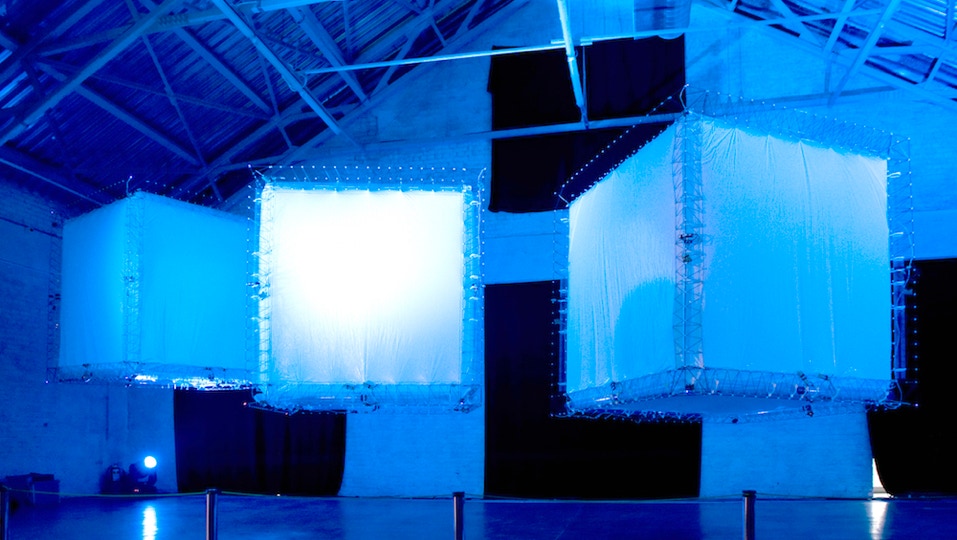
Figure 1‑12 : Trois Aerostabiles, des cubes flottants automates de Reeves et Saint-Onge (Moscou, 2010).
Ce lien entre les mouvements artificiels d’un robot et les émotions ressenties par le visiteur est d’une importance capitale pour trois raisons : Tout d’abord, il prouve à nouveau, si cela était encore nécessaire, que l’essence et le potentiel de tout automate résident dans sa capacité de simulation. Ensuite, il montre que, y compris pour les êtres vivants, de puissantes impressions et émotions peuvent être communiquées, même en ne prenant en compte que les composantes formelles des mouvements, des déplacements et des gestes. Enfin, conséquemment à la raison précédente, il ouvre la possibilité d’élaborer un vocabulaire strictement formel ou mécanique permettant de provoquer et de contrôler des impressions et émotions humaines, avec tous les risques et avantages potentiels que cela comporte.
Les œuvres d’art robotiques présentent plusieurs autres aspects des automates des origines. Le théâtre de marionnettes construit par Héron d’Alexandrie trouve son écho contemporain dans les œuvres de Szajner « The Owl and the Robot » ou « Petit Nicolas », scènes mettant en lumière des automates interactifs, théâtraux et contrôlés par ordinateur, dans celle de Vorn et Demers « No man’s land », qui comporte plus de cinquante robots de neuf espèces différentes détectant la présence d’observateurs et y réagissant (Demers et Vorn 1995) ou encore dans le « Ballet robotique » de Rogers, film mettant en scène de grands robots industriels dont la chorégraphie vise à rappeler des animaux ou des plantes. « The Robotic Church » de Chico McMurphy comporte quarante robots différents jouant chacun leur séquence sonore (McMurphie 1989)[9].
Les interactions entre ces pièces sont plutôt élémentaires, mais elles montrent tout de même l’importance pour les artistes en robotique de tenter d’établir un dialogue entre le robot et les personnes qui le voient, ou tout du moins de provoquer une réaction ou une émotion chez ces derniers. L’étape suivante consistait à concevoir des œuvres où les êtres humains et les robots agiraient de concert dans les installations ou sur scène, en s’efforçant de maximiser l’intégration et la collaboration entre les artistes humains et robotiques. Parmi les pionniers de ce type de projet, Stelarc occupe une place particulière, ayant été le premier artiste à avoir utilisé des robots comme prothèses sur son propre corps. Dans son œuvre maîtresse, « Third Hand », il a tenté de manipuler un bras robotique fixé sur son avant-bras droit au moyen de ses propres impulsions musculaires, dans le but d’écrire un texte avec les deux bras simultanément (le sien et le bras robotique) (Stelarc 1981). Il a également conçu des pièces inversant les rôles de l’être humain et du robot : dans « Ping Body », des spectateurs de trois villes éloignées pouvaient provoquer des mouvements de son corps grâce à un système de stimulation musculaire (Stelarc 1995). L’une de ses pièces, plus confidentielle, mais aussi plus radicale, « The Human Speaker Experiment » (Figure 1-13), présente une artiste dont la langue, la gorge, les joues et les lèvres sont actionnées par des dispositifs mécaniques et électriques, ce qui permet à un ordinateur de lui faire articuler différents mots et sons (St-Onge et coll. 2017). Ce type d’installation convertit le corps humain en objet passif avec l’unique fonction de suivre les instructions d’un ordinateur, une sorte d’interface humaine. Tout comme les spectacles autodestructeurs à machines multiples des années 1980 du Survival Research Laboratories de Mark Pauline, Matt Heckert et Eric Werner, de telles installations portent des messages très forts au sujet des risques liés à l’envahissement de notre vie quotidienne par des dispositifs robotiques et au risque qu’ils échappent à tout contrôle humain (Ballet 2019).
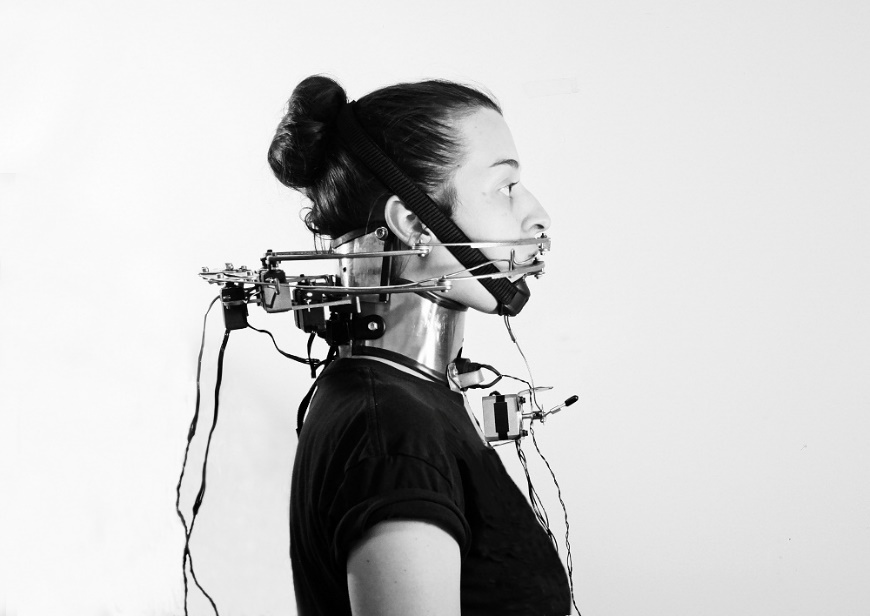
Figure 1‑13 : Expérience Human Speaker par l’artiste Nataliya Petkova, 2017
Il est impossible d’évoquer les arts robotiques sans s’attarder sur une autre catégorie d’œuvres, à savoir celles qui tentent délibérément de conférer l’apparence de la vie à des objets inanimés. « Robotic Chair » de Max Dean est une chaise d’aspect ordinaire qui se démonte et se remonte de manière autonome (Gérin 2008); Les Grands pianos de Boursier-Mougenot se déplacent lentement dans un espace d’exposition, se heurtant parfois entre eux (Bianchini et Quinz 2016); Le Soth Bot de Mike Phillips consiste en un prisme blanc de plusieurs mètres de haut qui se déplace imperceptiblement dans l’atrium d’un bâtiment public, se rapprochant de plus en plus des groupes de gens, qui finissent par remarquer sa présence et s’écarter rapidement de son chemin (Phillips 2007). Les robots sexués de Paul Granjon vivent dans une installation nommée « Robotarium », où leur unique préoccupation et objectif consiste à s’accoupler l’un avec l’autre. Ils s’inspirent également de plusieurs aspects des tortues de Walter : par exemple, lorsque le niveau de leur batterie diminue, ils recherchent l’endroit le plus sombre pour s’y nicher (Pitrus 2013). Ces œuvres comportent souvent une part d’humour, ce qui ne les dispense pas de porter des messages forts concernant les avenirs potentiels de la robotique et la nécessité de bien évaluer les risques associés à certains axes de développement particuliers.
D’autres artistes proposent des œuvres qui s’attaquent directement à ces notions, en s’impliquant dans les débats et les controverses entourant la recherche et le développement sur les robots tueurs. Ce type de machine nous confronte à des problèmes éthiques tout bonnement insurmontables. Dans une pièce de 2021 nommée Spot’s Rampage, le collectif MSCHF de Brooklyn s’est procuré l’un des célèbres robots jaunes en forme de chien de Boston Dynamics, fréquemment vu en train de jouer et de sauter sur des vidéos devenues virales. Le collectif a équipé le robot d’un pistolet à peinture et offert la possibilité à n’importe qui de le piloter en ligne, afin d’illustrer la possibilité de voir des robots policiers armés se répandre dans les rues des grandes villes (MSCHF 2019).
Les œuvres mentionnées dans la présente section ont pour point commun de ne pas pouvoir être reléguées à un seul domaine, elles sont toutes nourries par des données et renseignements issus du monde des arts, de la science et de la technologie. Elles sont intrinsèquement interdisciplinaires, post-disciplinaires même selon certains auteurs, car un artiste en robotique est en mesure d’errer librement dans les univers du théâtre, du spectacle, de la musique, de la vidéo, des expositions, de la sculpture, des bioarts, des arts visuels et bien d’autres, créant des œuvres précieuses dans chacun de ces mondes. Il est possible de les caractériser par leur franchissement incessant des frontières entre tous les champs et domaines et même leur épanouissement sur ces frontières. Tout comme leurs prédécesseurs automaticiens, les créateurs-chercheurs en arts robotiques se dévouent à la création d’œuvres d’art qui constituent leur objectif en elles-mêmes. Tout comme eux, grâce au processus de conception et de fabrication, ils acquièrent de nouvelles compétences, expertises et connaissances avancées qui pourront par la suite être transposées dans d’autres domaines. Tout comme eux, les mécanismes qu’ils imaginent peuvent être considérés comme des modèles d’aspects secrets ou mal expliqués de la réalité, aspects qu’ils contribuent à éclairer. Pour finir, la nature interactive de la plupart des œuvres robotiques nous relie directement au désir ancestral de concevoir des entités qui simulent les caractéristiques des êtres vivants.
1.9 La robotique sociale

Figure 1‑14 : Petit groupe de robots humanoïdes NAO de l’Université Jacques-Ier. NAO constitue l’une des plates-formes de robotique les plus populaires liées aux interactions humain-robot en psychologie et occupe une place de choix sur le marché de l’éducation des enfants.
Bien qu’il reste plusieurs défis à relever avant que les robots ne soient en mesure de se déplacer sur des terrains accidentés, les robots aspirateurs et les animaux de compagnie robotiques sont de plus en plus courants dans les foyers. L’intégration de robots dans nos routines quotidiennes peut entraîner des répercussions considérables sur nos vies, et trop peu d’études ont été menées à ce sujet pour l’instant. Toutefois, l’ouverture progressive à la psychologie, à l’éducation et à la sociologie dans le cadre de la recherche en robotique des dernières décennies a également contribué à découvrir le potentiel de bons compagnons artificiels des robots (Figure 1-14). Plusieurs entreprises se sont lancées sur ce marché avec des produits innovants, mais très peu ont vu leur audace couronnée de succès, en contradiction surprenante avec la réussite éclatante des jeunes entreprises du domaine de l’intelligence artificielle. Il existe une expression courante dans l’industrie : « la robotique est difficile ».
Si vous trouvez qu’il est difficile d’engager une conversation naturelle avec Siri ou Alexa, essayez-donc de construire un robot humanoïde qui puisse reproduire d’une quelconque manière les fonctions d’un être humain. Pour exprimer les choses simplement, les initiatives en matière de robots sociaux, comme Rethink Robotics, Jibo, Nao et Mayfield Robotics ont contribué à engendrer et à développer une industrie aussitôt supplantée par des concurrents plus agiles, à savoir des fabricants d’assistants robotiques sans pièce mobile. Pour d’obscures raisons, les investisseurs ont décrété que ces forces de marché surpassaient toute vision à long terme des entreprises de robotique et ont cessé leur financement. Boris Sofman, PDG et cofondateur d’Anki, donne un indice sur les raisons expliquant ce revirement :
« Il n’est pas possible de vendre un robot aux capacités égales ou inférieures à celles d’un Alexa pour $ ou 1000 $ »
Le roboticien Guy Hoffman ajoute :
« Lorsque les concepteurs fonderont leurs propres entreprises de robotique sociale et embaucheront des ingénieurs, plutôt que l’inverse, nous nous rendrons enfin compte de ce que recouvrait au départ le désir caché de robots domestiques. »[10]
Ceci ne signifie pourtant pas que les robots sociaux n’ont pas leur place parmi nous. De vastes connaissances non directement liées à la robotique en elle-même peuvent être acquises à la suite de ces expériences. Jibo, par exemple, constitue la première étude de cas majeure concernant la peine et le deuil des êtres humains envers un robot, des centaines de propriétaires ayant communiqué leur détresse et leur état psychologique à la suite de l’annonce de la fin de son existence. Il existe bien évidemment tout un champ de recherche à explorer, axé sur les émotions provoquées par les êtres artificiels. Comme nous avons pu le voir, le domaine des arts robotiques prend en compte et étudie ces phénomènes depuis plusieurs décennies à présent. Il n’est pas déraisonnable de supposer que des projets conjoints de création-recherche associant des scientifiques, psychologues, artistes et ingénieurs bénéficieront de l’ensemble des ressources théoriques et technologiques nécessaires pour s’attaquer à ces questions.
1.10 Les avenirs de la robotique et la transrobotique
Tout au long de ce chapitre, nous avons étudié plusieurs exemples d’une séquence d’événements au cours desquels une entité dont la forme évoque plus ou moins précisément celle d’un être vivant induit la création de dispositifs plus sophistiqués destinés à augmenter la similitude de cette évocation avec la réalité qu’elle représente, puis à son assimilation, puis à un modèle : la représentation devient alors le paradigme. La même situation s’est reproduite au niveau procédural avec les ordinateurs et l’informatique, lesquels sont à l’origine d’un nouveau modèle d’être humain pour qui la séparation antique entre l’âme et le corps est transposée, sous la forme d’une analogie formelle immédiate, en une séparation entre la matière et l’information.
Avant d’étudier les conséquences de ce modèle, il est intéressant de remarquer que le paradigme mécaniste du corps humain a facilement conduit à la réapparition d’un autre mythe primordial, à savoir que l’immortalité est à portée de main. L’idée du corps-machine suppose implicitement l’indépendance de ses divers composants et la possibilité de remédier à la défaillance d’un organe par la transplantation d’un organe identique ou par l’implantation d’une prothèse. C’est ainsi qu’est née la vision de la transformation graduelle des êtres humains en robots par le remplacement progressif de leurs composantes biologiques éphémères par des éléments artificiels à la longévité bien plus grande, grâce à l’usage de matériaux inaltérables comme le titane, l’or ou le palladium. De surcroît, ces êtres hybrides seraient progressivement en mesure d’évoluer dans des environnements de plus en plus hostiles, comme l’espace ou les abysses, voire à survivre à des voyages intergalactiques, repoussant d’autant les frontières des territoires colonisables par l’humanité.
Nous savons aujourd’hui que nulle matière n’est éternelle. Des éléments stables comme l’or peuvent ne pas être altérés pendant des milliards d’années, mais cela reste encore très loin de l’éternité. Aucun robot ne peut subsister à jamais. L’information, par contre, ne disparaît pas nécessairement. Comme elle peut être transmise d’une entité matérielle à une autre, elle peut théoriquement subsister aussi longtemps que l’Univers lui-même, ce qui se rapproche le plus de la notion d’éternité. L’analogie avec certaines propriétés de la matière vivante est évidente : la vue d’un fossile de fougère dans un musée nous est immédiatement reconnaissable, car nous avons pu voir des fougères vivantes relativement régulièrement au cours de notre existence. Ce fossile date toutefois d’il y a 300 millions d’années : notre capacité à reconnaître la plante signifie que l’information qui contrôle sa morphologie n’a pas changé depuis des éons, depuis plus longtemps que la plus haute chaîne de montagnes de la fin du Paléozoïque. Ceci nous mène donc à la conclusion que la vie constitue le processus optimal que la Nature a trouvé pour préserver l’information et lui permettre de traverser le temps : son immatérialité lui permet de passer d’un individu à sa descendance lorsque sa matérialité le rattrape. Cette stratégie inspirée par la vie a conduit à l’émergence d’une catégorie particulière d’automates, sur lesquels nous concentrerons à présent notre attention et qui tentent d’incarner trois caractéristiques des êtres vivants : l’autoconstruction et guérison, la réplication et l’évolution.
Les automates disposant de telles capacités ne sont encore qu’au stade embryonnaire et ne se trouvent que dans les laboratoires industriels ou universitaires. Cependant, le développement de composants mécatroniques miniaturisés et de nouveaux matériaux, ainsi que la disponibilité accrue de puissants microcontrôleurs bon marché, nous permettent d’entrevoir une utilisation pratique dans un avenir pas si lointain.
Les deux dernières décennies ont vu l’apparition de plusieurs exemples de structures robotiques autoconstructrices ou autoreconfigurables. L’un des premiers consiste en « briques » cubiques basiques équipées d’un bras sur chaque face. Des séries de tels cubes sont en mesure de bâtir des canevas cubiques de diverses configurations : les cubes peuvent transporter l’un des leurs d’un nœud du canevas au suivant (Yoshida 2003). Ces robots modulaires étaient toutefois plutôt lourds et encombrants, mais ils préparent le terrain aux systèmes miniaturisés dans lesquels de telles « briques » pourraient devenir les cellules de base de robots disposant de fonctions avancées. De plus, un robot construit de cette manière pourrait théoriquement se désassembler lui-même et se reconfigurer d’une manière totalement différente afin de s’adapter à des tâches variées. De tels dispositifs peuvent sembler encore très éloignés d’une éventuelle application pratique, mais leur potentiel est tel que plusieurs laboratoires leur dédient des recherches intensives. De nombreuses conceptions ont été testées, comme le robot bihémisphérique ATRON de Modular (Jorgensen et coll. 2004), les systèmes en chaînes comme le CEBOT (Fukuda et Kawauchi 1990), composés de trois cellules différentes (roue mobile, articulation simple, articulation de pliage), le Polypod de Yim, composé de segments et d’articulations (Yim et coll 1995), les systèmes de type fermes comme les Tetrobots de Hamlin (Hamlin et Sanderson 2012) ou l’Ortho-Bot de Ramchurn (2006), qui en est resté à l’étape conceptuelle.
Les chercheurs consacrent également une attention toute particulière aux robots disposant de capacités d’autoguérison. Ces derniers peuvent être grossièrement séparés en deux catégories. La première regroupe les robots mécaniques capables de réparer leurs propres composants au moyen d’outils intégrés dans leur structure, comme le robot PR2 configuré à l’Université de Tokyo (Murooka et coll. 2019). De tels robots seraient théoriquement en mesure de s’autoréparer après une panne, comme un chirurgien qui s’opérerait lui-même. La seconde catégorie comprend les robots composés de matériaux souples (« softbots ») qui se reconstruisent eux-mêmes après avoir été endommagés ou déchirés accidentellement par une collision, tout comme une peau biologique (Guo et coll. 2020).
En ce qui concerne l’évolution et la réplication, il ne s’agit pas de processus indépendants. Dans les deux cas, le robot doit contenir l’information qui le représente afin de la transmettre à un appareil en mesure de construire une copie identique de lui-même. Cet appareil peut être un équipement séparé, mais pour coller à l’analogie de processus du vivant, lequel peut être considéré optimal, car élaboré et peaufiné sur des milliards d’années d’évolution, le robot devrait être en mesure de produire lui-même ses propres répliques. L’évolution directe d’un robot physique est hors de portée des technologies actuelles. Il est toutefois intéressant de mentionner que la première évolution d’organismes numériques a été observée en 1984 sur un automate cellulaire (Langton 1984), comme une caractéristique émergente du système, à la surprise de ses concepteurs. Un automate cellulaire n’est pas un robot, mais l’existence potentielle d’un processus d’évolution dans la mémoire d’un ordinateur signifie que des générations successives de robots pourraient s’adapter progressivement à une tâche donnée.
Le projet Golem de Lipson et Pollack[11] était spécifiquement axé sur la création de robots comportant des spécifications particulières en matière de rendement, sans action humaine au niveau de la conception (Lipson et Pollack 2000). Leur morphologie résultait d’un processus d’évolution numérique, dont les résultats ont été évalués et sélectionnés par analyse, simulation et optimisation informatiques, avant l’établissement de leur forme finale. La seule intervention humaine consistait à fixer les actionneurs sur les divers composants. Le produit final consistait en un ver articulé équipé d’un bras triangulaire, en mesure de ramper sur diverses surfaces. Un tel résultat peut sembler décevant en considération de la sophistication du processus, mais il est possible de relativiser en se souvenant qu’il a fallu des centaines de millions d’années à la vie biologique pour atteindre le même résultat sur Terre. De plus, une observation attentive des diagrammes d’évolution révèle des analogies frappantes avec l’évolution biologique : les deux phénomènes passent par des phases stables, durant lesquelles il ne semble pas y avoir de solution aux problèmes ni de nouvelle espèce, qui sont suivies de phases où le nombre de solutions proposées explose. Savoir qu’un ordinateur peut faire évoluer des robots bien plus rapidement, et probablement plus efficacement, que la biologie nous rappelle que le domaine de la robotique présente des possibilités illimitées, tout autant que des risques qui doivent être consciencieusement pesés avant chaque nouveau développement ou tendance.
Nous terminerons ce chapitre avec un conte court qui nous transportera brièvement aux premières heures des automates. Il y a des milliers d’années, un artisan a créé un automate à forme humaine pour l’Empereur de Chine. Cette création était si réaliste et se comportait d’une manière si humaine qu’elle est devenue une vedette à la cour de l’Empereur. Tout le monde souhaitait être vu avec l’automate. Il se comportait avec une élégance et une politesse exquise envers chacun, en particulier les jeunes femmes, avec qui il flirtait. Malheureusement pour lui, il a commis l’erreur de flirter avec l’épouse favorite de l’Empereur. Sa colère fut terrible, il craignait que l’automate et sa femme ne deviennent amants. Il ordonna donc l’exécution immédiate de l’automate. L’automate avait commis l’erreur de pénétrer sur un territoire exclusivement réservé à l’Empereur, à savoir sa succession, menaçant ainsi la perpétration de son existence et de son héritage.
De nos jours, la situation est totalement inversée. En dépit des inquiétudes mythiques liées à ce type de projet, la construction d’un automate ou d’un robot apte à se reproduire lui-même et à évoluer en suivant des processus semblables à ceux du vivant constitue un objectif visé plutôt qu’une crainte. La première équipe à accomplir un tel prodige se verra ainsi immédiatement acclamée à l’échelle internationale. Cet élément se retrouve dans un projet très récent de Kriegman et Bongard (Kriegman et coll. 2021), dans lequel de petites entités composées de cellules cutanées de grenouilles sont qualifiées de « robots biologiques » dans les médias, un nom qui semble paradoxal, mais qui traduit la perplexité des commentateurs contemporains confrontés à de telles recherches[12]. Ces entités microscopiques sont en mesure de se répliquer elles-mêmes, non par division cellulaire (mitose), mais en assemblant d’autres cellules flottant librement dans leur environnement. Les nouvelles cellules sont ainsi des constructions biologiques, plutôt que les descendants de « parents » biologiques.
La plupart des robots de notre quotidien se consacrent à des tâches pratiques. Il est donc possible de s’interroger sur la pertinence de recherches poussées sur les robots d’inspiration biologique, les robots imitant la réalité ou les biorobots, si éloignés de nos vies quotidiennes. Deux arguments peuvent apporter une réponse. Le premier correspond à l’observation de l’efficacité optimale des processus du vivant pour n’importe quelle tâche imaginable et l’espoir que cette efficacité pourrait être un jour transposée aux entités artificielles. Le second est lié au fait qu’après des milliers d’années d’évolution, les recherches les plus avancées sur les automates et les robots restent profondément liées aux mythes et aux craintes ayant mené à la création des premiers d’entre eux, il y a des millénaires. Les expériences de Kriegman et Bongard ont démontré que la convergence avec les êtres vivants, autrefois illusoire, est à présent plus forte que jamais et que les significations du terme « robot » et du suffixe « bot » se sont étendues bien au-delà de leur sens d’origine. De nouvelles connaissances concernant les processus biologiques et génétiques ont conduit à l’émergence d’automates et de robots inspirés par le vivant, lesquels ont à leur tour procuré de nouveaux modèles et connaissances de certains des processus en question.
Il est encore trop tôt pour déterminer lesquelles de ces tentatives seront couronnées de succès et lesquelles ne resteront dans l’Histoire qu’en tant qu’étapes dans la généalogie continue des automates. Il est cependant possible de supposer raisonnablement que l’avenir de la robotique réside en une convergence plus prononcée entre les entités biologiques et artificielles de toutes tailles, de la molécule à l’organisme complet en passant par la cellule, et que nous assisterons bientôt à la naissance de robots hybrides comportant une part croissante de composants biologiques ou inspirés par le vivant, lesquels sortiront des laboratoires pour coloniser les environnements domestiques et industriels.
1.11 Résumé du chapitre
1.13 Lectures supplémentaires
Demson M, Clason C R (2020)
Romantic Automata: Exhibitions, Figures, Organisms. Bucknell University Press
Une brillante collection d’essais, pour la plupart basés sur la littérature du 18e siècle sur les robots et les automates, qui décrivent les sentiments contradictoires ayant émergé à l’époque romantique, lorsque l’on s’est rendu compte que la construction d’entités artificielles similaires au vivant, œuvres autrefois considérées comme des prouesses technologiques, pourrait en fait conduire à l’émergence d’êtres mécaniques privés des qualités inhérentes à l’humanité comme l’empathie et la compassion. Source de fascination et de divertissement depuis des siècles, l’automate a commencé, en peu de temps, à engendrer des émotions moins positives comme la peur et la terreur, dans un moment décisif que les auteurs appréhendent intelligemment.
Herath D, Kroos C, Stelarc (2016)
Robots and Arts: Exploring an Unlikely Symbiosis. Springer, Berlin
Livre pionnier sur les arts robotiques de toutes sortes, Robots and Arts présente, à travers certains des projets les plus emblématiques du domaine, une réflexion consciencieuse et approfondie sur le rôle, le statut et l’avenir des robots dans un monde où ces êtres artificiels deviennent progressivement des compagnons et des partenaires du quotidien. Il constitue une démonstration éloquente de la contribution essentielle des artistes au discours général sur l’évolution des technologies. L’argumentation est élaborée à l’aide d’un recueil interdisciplinaire de textes d’artistes, de scientifiques et d’ingénieurs. Bien que ce ne soit pas l’objectif principal de l’ouvrage, les différentes contributions plaident également en faveur de l’importance de la création-recherche, en montrant le grand nombre de disciplines, d’expertises et de compétences requises pour produire même des œuvres d’art robotique simples, et la nécessité de promouvoir de telles collaborations fructueuses dans les laboratoires universitaires ainsi que dans les studios d’artistes et les centres de recherche technologique.
Foulkes N (2017)
Automate. Xavier Barral, Paris
L’histoire épique des automates, du plus ancien au plus récent, dans un livre abondamment illustré avec des documents de toutes les périodes. Les liens intimes des automates avec l’horlogerie, leur évolution parallèle à celle des technologies, leurs liens avec la magie et les mythes, sont clairement exposés, ainsi que les différents rôles qu’ils ont occupés tout au long de l’histoire, dans diverses régions du monde. Un livre bien argumenté qui peut servir d’introduction et de référence.
Mayor A (2018)
Gods and Robots: Myths, Machines and Ancient Dreams of Technology. Princeton University Press
Un récit historique des liens entre les personnages fantastiques des premiers mythes de l’histoire, en Crète, dans l’Empire romain, en Grèce, en Inde et en Chine, et les premières incarnations de ces êtres et mécanismes artificiels qui sont les ancêtres de tous les robots et automates conçus depuis. Peut-être l’une des évocations les plus claires de l’origine des automates, tous nés de cette obsession d’insuffler la vie à des êtres inanimés, et une démonstration irréfutable du rôle fondamental de l’art, de l’imagination et des légendes dans les plus importantes découvertes scientifiques et techniques.
Nocks L (2008)
The Robot : The Life Story of a Technology. John Hopkins, Baltimore
Une histoire de robots centrée principalement sur les aspects technologiques du domaine. L’argument reste généralement plus factuel que pour les précédents ouvrages, et accorde moins d’importance aux origines non technologiques des automates, mais il prend toute son importance à la lumière de plusieurs éléments qui serviront de référence utile, un glossaire, une chronologie, une bibliographie abondante, ainsi que des informations sur l’état de la recherche et du développement de la robotique contemporaine au moyen de statistiques sur les laboratoires, les entreprises et les firmes actuellement en exploitation.
Wilson S (2003)
Information Arts : Intersections of Art, Science, and Technology. MIT Press, Cambridge
Ouvrage de référence dans ce domaine, Information Arts se présente comme la première enquête internationale sur ces artistes qui ont préfiguré le développement de la création-recherche en exploitant les données et les concepts de tous les domaines scientifiques, ainsi que les résultats d’un grand nombre de progrès technologiques. Bien argumenté d’un point de vue théorique, ce travail essentiel, basé entre autres sur l’analyse visuelle et bibliographique des grandes approches artistiques, montre encore une fois que l’artiste ne se limite pas à mettre en scène ces concepts et leurs développements : par les positions qu’il prend face à leurs conséquences sociales et culturelles, il participe au discours sur leur évolution et devient un acteur à part entière dans la détermination des futurs programmes de recherche.
RÉFÉRENCES
Al-Jazari A, trad. Hill D. R. (1974) The book of knowledge of ingenious mechanical devices. D. Reidel, Dordrecht
Ballet N (2019) Survival Research Laboratories: a dystopian industrial performance art. Dans Arts 2019, 8(1), 17. doi.org/10.3390/arts8010017
Benthall J (1971) Edward Inhatowicz’s Senster. Dans Studio International, nov. 1971, p. 174
Bianchini S, Quinz E (2016) Behavioral Objects | A case study: Céleste Boursier-Mougenot. MIT Press, Cambridge
Capek, K. (2004). R.U.R., Penguin Classics.https://www.penguinrandomhouse.ca/books/286379/
Carrera L., Loiseau. D, R#Capekretouroux O (1979) Les automates des Jacquet-Droz. Sciptar – F.M. Ricci, Milano
Coulton J J (2002) The dioptra of Heron of Alexandria. Dans : Wolpert L, Tuplin J, Rihl T E (éd.), Science and mathematics in ancient Greek Culture, Oxford University Press, p 150-164
Demers L. P., Vorn B. (1995) Real Artificial Life as an Immersive Media. Dans 5th Biennial Symposium on Arts and technology, p 190-203
Demson M, Clason C R (2020) Romantic Automata: Exhibitions, Figures, Organisms. Bucknell University Press
Descartes R. (1637) Discours de la Méthode Pour bien conduire sa raison, et chercher la vérité dans les sciences, partie V. Projet Gutenberg, https://www.gutenberg.org/files/13846/13846-h/13846-h.htm. Page consultée le 31 décembre 2021
Eymard P. (1863) Historique du métier Jacquard. Imprimerie de Barret, Lyon
Foulkes N. (2017) Automata. Xavier Barral, Paris
Fukuda T, Kawauchi Y. (1990) Cellular robotic system (CEBOT) as one of the realization of self-organizing intelligent universal manipulator. Présentations à la Conférence internationale de l’IEEE sur la robotique et l’automatisation, vol 1, p. 662-667, doi : 10.1109/ROBOT.1990.126059
Gérin A (2008) The Robotic Chair: entropy and sustainability. Dans Espace Sculpture 83, p 40–40
Gorvett Z. (2016) Leonardo da Vinci’s lessons in design genius”, BBC Future, https://www.bbc.com/future/article/20160727-leon
Guo H., Tan Y. J., Chen G. et coll. (2020) Artificially innervated self-healing foams as synthetic piezo-impedance sensor skins. Nat Commun 11, 5747 doi : https://doi.org/10.1038/s41467-020-19531-0. Page consultée le 30 décembre 2021
Hamlin G. J., Sandersen A. C. (2012) Tetrobot: a modular approach to reconfigurable parallel robotics. Springer Verlag, New York
Herath D., Kroos C., Stelarc (2016) Robots and Arts: Exploring an Unlikely Symbiosis. Springer
Jorgensen M. Wl., Ostergaard E. H., Lund H. H. (2004) Modular ATRON: modules for a self-reconfigurable robot, 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), vol. 2, 2068-2073 doi : 10.1109/IROS.2004.1389702
Kriegman S., Blackiston D., Levin M., Bongard J. (2021) Kinematic self-replication in reconfigurable organisms. Page consultée le 30 décembre 2021
La Mettrie J. O. (1748) L’homme machine. Elie Luzac Fils, Leyde, 1748
Langton C G (2000) Evolving physical creatures. Artificial Life VII: Proceedings of the Seventh Artificial Life Conference. Bedeau M. A., McCaskill J. S., Packard N. H., Rasmussen S. (éd.) p. 282-287, MIT Presse, Cambridge
Pollack J. B., Lipson H. (2000) The GOLEM Project: evolving hardware bodies and brains. Présentations. The Second NASA/DoD Workshop on Evolvable Hardware, p. 37-42. doi : 10.1109/EH.2000.869340.
Lovelace A. (1843) Notes on Luigi Menabrea’s paper, autograph letter to Charles Babbage. Ajout MS 37192 folios 362v-363, British Library, Londres
Marr B. (2016) Why Everyone Must Get Ready For the 4th Industrial Revolution,
Mayor A. (2018) Gods and Robots: Myths, Machines and Ancient Dreams of Technology. Princeton University Press
McMurphy C. (1989) The Robotic Church. Sur le site Web Amorphic Robot Works,
http://amorphicrobotworks.org/the-robotic-church. Page consultée le 30 décembre 2021
MSCHF (2019) Spot’s Rampage. https://spotsrampage.com. Page consultée le 30 décembre 2021
Mortensen O. (1957) Jens Olsen’s clock: A technical description. Technological Institute, Copenhague
Murphy S. (1995) Heron of Alexandria’s “On automaton-making”. History of Technology 17:1-44
Murooka T., Okada K., Inaba M. (2019) Self-repair and self-extension by tightening screws based on precise calculation of screw pose of self-body with CAD data and graph search with regrasping a driver. 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids) p 79-84, doi : 10.1109/Humanoids43949.2019.9035045
Nocks L. (2008) The Robot. The Life Story of a Technology. John Hopkins, Baltimore
Phillips M. (2007) Sloth-Bot. https://arch-os.com/projects/slothbot/. Page consultée le 30 décembre 2021
Piquemal M., Merlin C. (2005) Le manège de Petit Pierre. Albin Michel Jeunesse, Paris
Pitrus A. (2013) No Longer Transhuman: Handmade Machines, Paul Granjon. Dans International Journal of Cultural Research 3(12) p. 129-133
Ramchurn V., Richardson R. C., Nutter P. (2006) ORTHO-BOT: A modular reconfigurable space robot concept. Dans Tokhi M. O., Virk G. S., Hossain M. A. (éd.) Climbing and Walking Robots, p. 659-666. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-26415-9_79
Regine (2008) Cloaca 2000-2007, We Make Money Not Art, 19/01/2008
https://we-make-money-not-art.com/wim_delvoye_cloaca_20002007/ (page consultée le 30 jan. 2022)
Reeves N. (1992) Syndrome de Geppetto et machine de Türing. Agone 8-9:139-156
Reeves N., St-Onge D. (2016) Still and useless: the Ultimate Automaton. Dans Robots and Art: Exploring an Unlikely Symbiosis. Herath D., Kroos C., Stelarc (éd.). Springer, Berlin.
St-Onge D, Reeves N., Petkova N. (2017) Robot-Human interaction: a human speaker experiment. HRI ’17: Présentations à la Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction p. 30-38. doi:10.1145/3029798.3034785
Stelarc (1995) Ping Body. http://www.medienkunstnetz.de/works/ping-body/. Page consultée le 30 décembre 2021
Stelarc (1981) Third Hand. http://stelarc.org/?catID=20265. Page consultée le 30 décembre 2021
Vaucanson J. (1738) Le mécanisme du flûteur automate. Jacques Guérin, Paris
Vorn B. (2010) Mega Hysterical Machine. Google Arts & Culture. https://artsandculture.google.com/asset/mega-hysterical-machine-bill-vorn/twEoqSJUmM0i7A. Page consultée le 30 décembre 2021
Wilson S. (2003) Information Arts, Intersections of Art, Science, and Technology. MIT Press, Cambridge
Woodcroft B. (1851) The pneumatics of Heron of Alexandria from the original greek. Taylor Walton and Maberly, Londres
Yim M., Lacombe J. C., Cutkosky M., Kathib O. (1995) Locomotion with a unit-modular reconfigurable robot. Dissertation, Stanford University
Yoshida E., Murata S., Kamimura A., Tomita K., Kurokawa H., Kokaji S. (2003) Research on self-reconfigurable modular robot system. JSME Int Journal 4 (46) p. 1490-1496
Zek Y., Balina A., Guryev M., Semionov Y. (2006) The Peacock Clock.
https://web.archive.org/web/20080202131950/http://www.hermitagemuseum.org/html_En/12/2006/hm12_1_22.htmlPage consultée le 12 décembre 2021
Téléchargez les références : ↓
Liste des figures
Figure 1‑1 : Scène de la pièce Rossumovi univerzální roboti (R. U. R.), de Karel Čapek
Figure 1‑4 : Automate humanoïde de Léonard de Vinci, environ 1495
Figure 1‑6 : Les automates de Jacquet-Droz : Le dessinateur, la musicienne, l’écrivain, 1767-1774
Figure 1‑7 : Un métier Jacquard, 1801
Figure 1‑10 : Bras robotique Unimate déployé dans l’usine de General Motors
Figure 1‑13 : Expérience Human Speaker par l’artiste Nataliya Petkova, 2017
Attributions
Figure1-1
A scene from R.U.R., showing three robots est dans le domaine public (CC0).
Figure 1-2
Horloge hydraulique de Ctésibios par Claude Perrault est dans le domaine public (CC0)
Figure 1-3
The elephant clock from Al-Jazari’s manuscript par Al-Jazari est dans le domaine public (CC0).
Figure 1-4
Model of a robot based on drawings by Leonardo da Vinci par Erik Möller est dans le domaine public (CC0).
Figure 1-5
Imaginary rendering of Vaucanson’s digesting duck in Scientific American par A. Konby est dans le domaine public (CC0).
Figure 1-6
Jaquet-Droz automata, musée d’Art et d’Histoire de Neuchâtel par Rama est sous licence Creative Commons Attribution – Partage dans les Mêmes Conditions 2.0 France (CC BY-SA 2.0 FR)
Figure 1.7
Un métier à tisser de Joseph Marie Jacquard (XIXe) est dans le domaine public (CC0).
Figure 1-8
Machine Analytique de Charles Babbage, exposée au Science Museum de Londres (Mai 2009) par Bruno Barral est sous licence Creative Commons Attribution – Partage dans les Mêmes Conditions 2.5 Générique (CC BY-SA 2.5)
Figure 1-9
METHOD OF AND APPARATUS FOR CONTROLLING MECHANISM OF MOVING WESSELS OR VEHICLEs par Nikola Tesla est dans le domaine public (CC0)
Figure 1-10
Unimate at General Electric Par Computer History Museum est dans le domaine public (CC0).
Figure 1-11 gauche
SRI’s Shakey, the first mobile robot that could make decisions about how to move in its surroundings par SRI International est sous licence Creative Commons Attribution par Partage dans les Mêmes Conditions 3.0 non transposé (CC BY-SA 3.0)
Figure 1-11 droite
« Tortoise » Mobile Robot Par Smithsonian est dans le domaine public (CC0) .
Figure 1-12
Trois Aerostabiles, des cubes flottants automates Par Anna Ablogina est sous licence Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0)
Figure 1-13
Expérience Human Speaker par l’artiste Nataliya Petkova est sous licence Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0)
Figure 1-14
Nao robot, Jaume University par Kai Schreiber est sous licence Creative Commons Attribution – Partage dans les Mêmes Conditions 2.0 Générique (CC BY-SA 2.0)
- La mesure de l’heure ne représentait que l’une des nombreuses fonctions, parfois anecdotique, des premières horloges mécaniques, comme celle construite par Richard de Wellington vers 1330, la grande Orloj astronomique de Prague, ou la très rare horloge héliocentrique d’Olomouc, également en République tchèque. De nombreux autres cadrans indiquaient alors le temps sidéral, les signes du zodiaque, les phases et positions de la lune, les mouvements du soleil et des planètes, les solstices et équinoxes, les horaires des marées, etc. Certaines horloges effectuaient une révolution en plusieurs décennies ↵
- Des dispositifs plus récents, comme la Peacock clock exposée au Musée de l’Ermitage de Saint-Pétersbourg, mêle intimement la mesure du temps avec la simulation de la vie (Zek et coll. 2006). Cet exceptionnel dispositif mécanique se compose d’un immense paon qui, une fois par semaine, étend ses ailes, déploie sa queue et remue la tête. Un coq chante, un hibou tourne la tête, cligne des yeux et fait résonner un carillon. Un petit cadran, quasiment perdu au milieu de la machine, donne l’heure, en toute discrétion. Le concept de temps et le cycle des jours sont principalement évoqués par les trois animaux : le hibou symbolise la nuit, le coq le jour et le paon constitue un symbole de renaissance ↵
- Ce mécanisme, et de nombreux autres automates conçus par Héron, ont été reconstruits par le Kotsanas Museum of Ancient Greek Technology. Il est possible d’observer ces dispositifs en fonctionnement dans une vidéo tournée par le Musée à l’adresse http://kotsanas.com/gb/exh.php?exhibit=0301001 (page consultée le 30 décembre 2021). ↵
- Fait intéressant, l’idée d’évoquer la vie au moyen des fonctions les moins prestigieuses trouve un écho contemporain dans la série de travaux « Cloaque » de Wim Delvoye (Regine 2008), qui reproduit toutes les étapes de la digestion humaine, de la mastication à l’excrétion, au moyen de chambres successives où la nourriture est décomposée par certains des enzymes, bactéries et composés biochimiques présents dans le système digestif. L’installation doit être nourrie deux fois par jour. En observant le fonctionnement du dispositif, il est aisé d’avoir l’impression que l’artiste, aidé d’une équipe de biologistes, a parfaitement saisi les mécanismes de plusieurs fonctions vitales. Il s’agit toutefois ici encore d’une illusion, partielle tout du moins. L’utilisation de substances biologiques et d’organismes vivants, comme des bactéries, ne permet pas au dispositif de bénéficier du qualificatif d’automate, car il n’est pas composé exclusivement de matériaux inertes. Il n’apporte également pas de compréhension exhaustive des phénomènes impliqués, ce qui n’était de toute façon pas l’intention explicite de son créateur. Toutefois, en dépit de la masse d’explications fournie et de l’apparence hautement technologique de l’ouvrage, le visiteur est envahi par l’impression de présence d’une étrange bête plongée dans la torpeur d’une digestion difficile, comme un animal après un repas trop copieux. Il se demande alors si cette bête sera dangereuse une fois éveillée. Il suffit de mentionner la fonction digestive pour que le visiteur fasse automatiquement le lien avec un être vivant. ↵
- Les nombres de Bernoulli, nommés en l’honneur du mathématicien suisse Jakob Bernoulli, ont été découverts en 1713 au cours de l’étude des sommes de puissances de nombres entiers. Si Smn représente la somme des n premiers nombres entiers élevés à la puissance m, alors la valeur de la somme est donnée par la formule :
[latex]S_{m}(n)=\dfrac{1}{m+1}\sum_{k=0}^{m}\binom{m+1}{k}B_{k}n^{m-k+1}[/latex]
Où les coefficients Bk sont les nombres de Bernoulli. Ils peuvent être obtenus grâce à la fonction génératrice suivante :
[latex]\dfrac{x}{e^{x}-1}=\sum_{k=0}^{\infty }\dfrac{B_{K}x^{K}}{K!}[/latex]
L’algorithme d’Ada Lovelace était dérivé de cette fonction. ↵
- Il est intéressant de noter que Staubli et Brown Boveri sont deux entreprises suisses, un pays largement reconnu comme le lieu de naissance de l’horlogerie. Depuis plus de quatre siècles, il s’agit du pays où la recherche et le développement d’horloges mécaniques de toutes tailles restent les plus actifs. Il est donc raisonnable de penser que l’expertise unique en matière de micromécanisme acquise ici s’est révélée essentielle pour le développement de la robotique et l’émergence d’une industrie robotique de pointe. Fait moins connu, cette situation provient, paradoxalement, de motifs religieux. Lorsque la Suisse s’est convertie au protestantisme après la Réforme du 16e siècle, Calvin a banni le port de tout objet ornemental. Les joailliers et les bijoutiers ont ainsi dû trouver d’autres manières d’exercer leurs talents. Ils les ont employés à créer des montres et des horloges qui, du fait de leur fonction pratique, pouvaient être portées. Elles sont alors devenues des œuvres d’art miniatures, permettant aux riches d’exhiber leur fortune sans encourir les foudres de l’Église. Les horlogers se sont installés dans plusieurs villes, la plupart d’entre elles situées dans l’arc jurassien, à proximité de la frontière française, l’endroit même où la famille Droz-Jacquet avait construit ses célèbres automates. À nouveau, par d’étranges méandres, l’expertise issue du monde des arts - la bijouterie- a été à l’origine de l’une des évolutions majeures de la robotique et de l’industrie associée. ↵
- iRobot Create a été créé par le même fabricant qui vend les aspirateurs robots Roomba. ↵
- Ce n’est bien évidemment pas limité aux artistes, comme le démontrent les tortues de Walter (des robots parmi les plus simples possibles) ou par un automate cellulaire comme le Jeu de la vie de John Conway, un système quasi élémentaire décrivant la naissance et l’évolution d’une vie artificielle, une science nouvelle qui a engendré de nombreux résultats théoriques et technologiques dans plusieurs disciplines depuis les années soixante. ↵
- L’installation de McMurphie évoque étrangement un célèbre automate de faible niveau technologique d’art brut, « Le manège de Petit Pierre », une foire mécanique à taille réelle créée et construite par Pierre Avezard, un garçon de ferme handicapé, qui diffère des théâtres d’automates plus sophistiqués par la seule fragilité de ses matériaux (Piquemal et Merlin 2005). ↵
- Stalker and stalked: What Killed Off Jibo, Kuri and Kozmo? Dans Asian Robotics Review 273, https://asianroboticsreview.com/home273-html (consultée le 30 janvier 2022). ↵
- Remarquez la référence mythologique! ↵
- Les auteurs ont nommé leurs créatures « Xenobots ». ↵

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
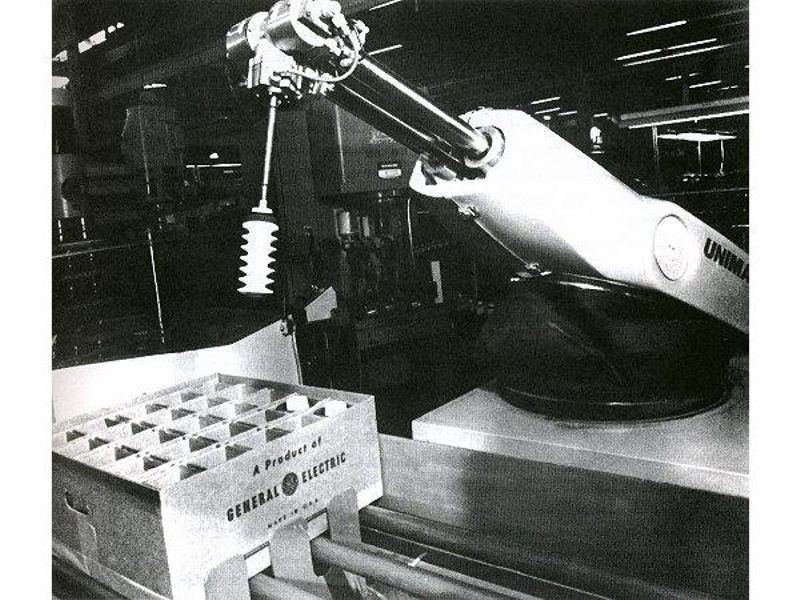{kind=link}
{kind=link}
{kind=link}