
1 Modélisation acoustique dans le domaine de la protection auditive
La modélisation peut-elle aider à faire progresser les connaissances dans le domaine de la protection auditive ? Cette section tente de montrer au lecteur ou à la lectrice en quoi le recours à la modélisation comme complément aux méthodes de mesure et à l’empirisme est une voie prometteuse pour les chercheurs et les industriels qui cherchent à résoudre les problématiques de protection auditive évoquées dans le Tome I de cet ouvrage. Les symboles utilisés dans ce document sont listés dans la section Nomenclature.
Intérêt de la modélisation
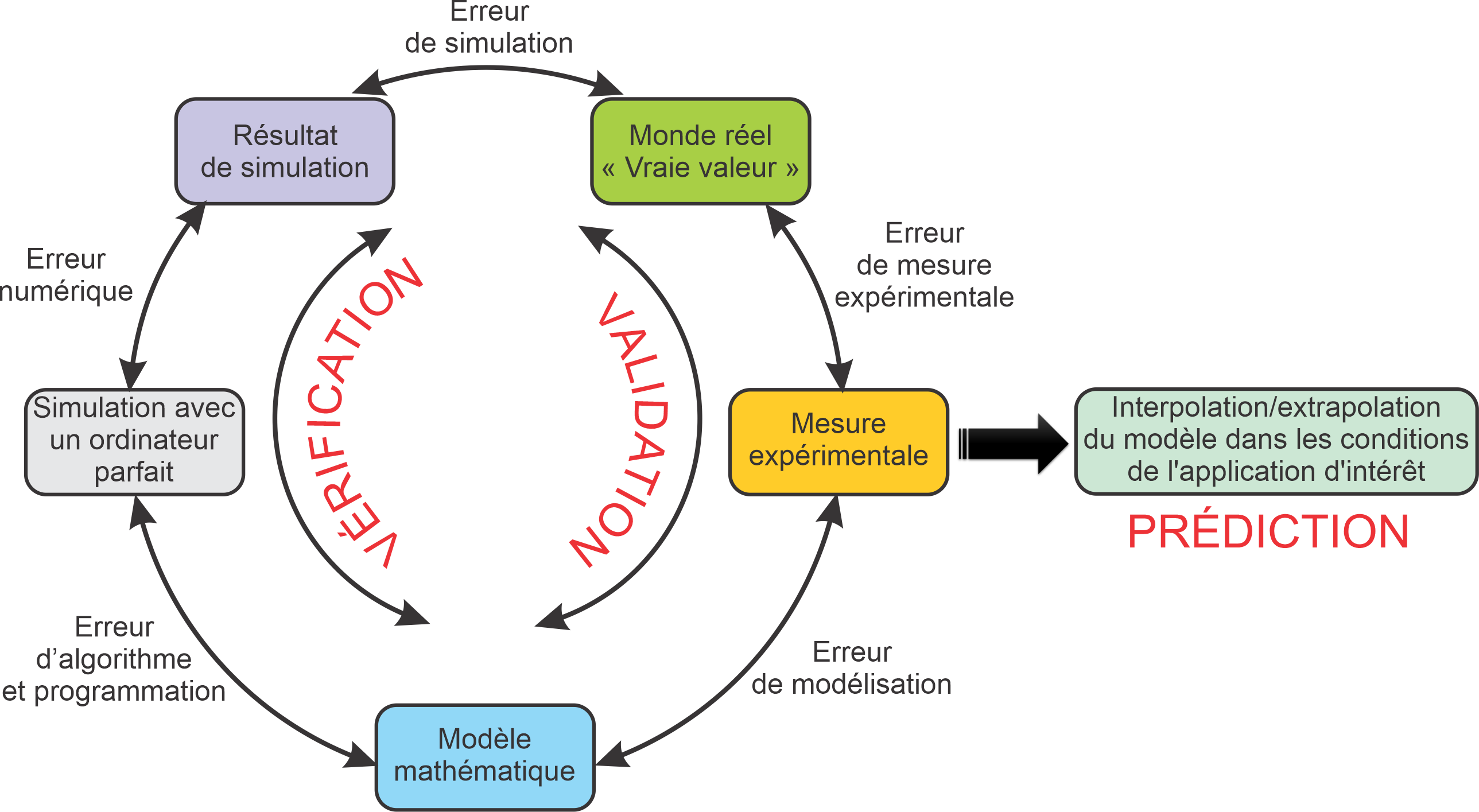
En science, un modèle est une représentation d’un système réel qui vise à comprendre ce système. Aujourd’hui cette représentation est à la fois de nature conceptuelle et informatique. Le modèle conceptuel inclut toutes les informations physiques pertinentes, les hypothèses de modélisation et les équations mathématiques qui régissent le système physique. Le modèle (ou code) informatique met en œuvre le modèle conceptuel à l’aide de la programmation informatique. La vérification traite de la relation entre le modèle conceptuel et le modèle informatique alors que la validation traite de la relation entre le modèle informatique et la réalité. Outre décrire, analyser, expliquer ou simplement documenter un système complexe, un modèle peut s’avérer particulièrement utile pour fournir une estimation indirecte de quelque chose qui est difficile à mesurer directement, aider à concevoir des expériences pour tester des hypothèses, faire des prédictions ou prendre des décisions, aider à concevoir efficacement des prototypes via une réduction des délais et des coûts de développement et des tests réalisés dans des conditions qui ne pourraient l’être en pratique pour des raisons d’éthique, de sécurité ou de destruction.
Dans le cadre de la protection auditive, un modèle du comportement acoustique de l’oreille occluse par un protecteur auditif peut, par exemple, (i) aider à comprendre finement les mécanismes de transmission sonore à travers le protecteur auditif (ii) être de ce fait une alternative efficace à l’empirisme et aux méthodes d’essais/erreurs utilisés pour concevoir des protecteurs auditifs adaptés à l’environnement sonore (iii) aider à estimer les variables physiques corrélées a priori au confort du protecteur (iv) aider à élaborer des méthodes de mesures pour caractériser les performances des protecteurs auditifs ou l’exposition sonore du travailleur (v) améliorer la conception des ATF pour la mesure d’atténuation sonore des protecteurs auditifs (vi) concevoir des ATF réalistes permettant d’évaluer les variables objectives associées au confort des protecteurs auditifs.
En effet, en ayant le contrôle sur chaque paramètre d’entrée du modèle[1], l’effet individuel ou combiné de ces derniers peut être étudié précisément de façon virtuelle en s’affranchissant des difficultés associées aux conditions expérimentales (ex éthique, difficultés techniques, variabilité intra et inter-individuelle des sujets, erreurs de l’opérateur, bruit aléatoire dans la mesure des signaux, mauvais placement du microphone). Des analyses de sensibilité peuvent être utilisées afin de déterminer quels sont les paramètres du modèle les plus importants. Un modèle permet également de comparer virtuellement des variantes de situations expérimentales ou de prototypes de protecteurs ou d’ATF avant leur développement.
Bien sûr, avant d’être exploité, le modèle voit être vérifié, calibré et validé dans un cadre qui tient compte des incertitudes de la modélisation et de l’expérimentation. Les concepts de vérification, validation et calibration sont discutés en détails dans plusieurs excellents ouvrages de référence que le lecteur ou la lectrice sont invités à consulter (Oberkampf et Roy, 2010 ; Murray-Smith, 2015 ; Beisbart et Saam, 2019) et sur lesquels on se base ici pour présenter de façon générale ces concepts.
La validation est l’évaluation de l’exactitude du modèle mathématique par rapport aux observations dans le monde réel de la « vraie valeur » qu’on cherche à prédire et qui se présentent sous la forme de mesures expérimentales (c’est-à-dire de données). Notons que la « vraie valeur » n’est jamais connue et donc les données expérimentales s’accompagnent d’incertitudes aléatoires et systémiques. L’exactitude du modèle peut être par exemple évaluée grâce à un opérateur de validation métrique qui mesure la concordance entre les résultats de simulation et les observations expérimentales. La validation est très souvent confondue avec la vérification, qui elle, consiste à évaluer la précision numérique d’une simulation par rapport à la solution exacte du modèle mathématique. Il est important d’utiliser les bons termes pour éviter les incompréhensions. La vérification et la validation fournissent un moyen d’évaluer la crédibilité et l’exactitude des modèles mathématiques et de leurs simulations ultérieures. En pratique, l’étape de vérification doit être faite avant celle de validation auquel cas les résultats du modèle mathématique correspondent à ceux du modèle informatique. La différence entre la valeur de l’indicateur que l’on cherche à prédire, fournie par le modèle mathématique et sa « vraie valeur » est appelée le biais ou erreur de forme du modèle. Le biais inclut l’effet de toutes les hypothèses et approximations du modèle mathématique mais dépend également des mesures expérimentales accompagnées de leurs incertitudes, que ce soit à travers celles associées à la quantité qu’on cherche à simuler mais également celles associées aux paramètres d’entrée du modèle (géométrie, propriété des matériaux, conditions aux limites et initiales). Si l’étape de vérification a été faite, le biais peut s’exprimer en termes de différence entre la réalité et la simulation. La Figure 1 illustre ces concepts.
Alors que la validation implique l’évaluation quantitative d’un modèle par rapport aux données expérimentales, la calibration implique l’ajustement de paramètres d’entrée du modèle pour améliorer la concordance entre résultats du modèle et données expérimentales. On fait ici référence aux paramètres d’entrée qui doivent être ajustés du fait qu’ils ne peuvent pas être mesurés directement et/ou sont affectés par les couplages à l’intérieur du système, par exemple les propriétés mécaniques in vivo des tissus mais aussi aux paramètres ad-hoc qui n’ont pas nécessairement de signification physique (ex les paramètres statistiques de l’émulateur du modèle (voir section 3.4)). Dans la littérature, le terme « calibration » peut être plutôt réservé à ce dernier type de paramètres alors qu’on parlera d’« estimation de paramètres » pour les premiers (Oberkampf et Roy, 2010). La calibration du modèle fournit un modèle modifié, car les paramètres du modèle sont mis à jour mais son exactitude doit encore être évaluée lorsque de nouvelles données expérimentales deviennent disponibles[2] (Beisbart et Saam, 2019).
Si on peut faire confiance au processus de mesure incluant les appareils de mesure et l’ensemble des hypothèses qui y sont associées, alors lorsque des différences entre modèle et observations expérimentales effectuées dans le cadre de l’expérience de validation sont importantes, il y a lieu de remettre en cause le modèle et de formuler de nouvelles hypothèses de modélisation avant de recommencer le processus de validation. Le processus de validation d’un modèle est donc en général itératif. Les observations expérimentales permettent potentiellement d’affiner le modèle. Le schéma circulaire de la figure devrait en fait plutôt être représenté sous forme de spirale où un modèle permet de faire une prédiction qui est confrontée à une observation faite à l’occasion d’une expérience montée pour valider le modèle. Si l’accord entre la prédiction et l’observation n’est pas bon alors on affine le modèle qui est alors différent de celui de départ et on recommence le cycle d’où l’image de la spirale (Postulat, 2021).
Description du problème à modéliser
La Figure 2 montre un schéma de la configuration physique à modéliser dans le but de prédire les variables physiques corrélées a priori au confort du protecteur (voir Tome 2 – Chapitre 1). Cette configuration illustre une schématisation de la tête d’un sujet portant un protecteur auditif intra-auriculaire. Ce protecteur peut être également de type supra-auriculaire ou une combinaison des deux (double protection)[3]. Le sujet peut être excité de façon externe par un bruit provenant d’une source acoustique externe (ex machines, trafic, etc) où par une vibration mécanique générée par un transducteur mécanique (ex. ossivibrateur) imposée directement à sa tête. Il peut également être soumis à une sollicitation interne comme ses bruits physiologiques (ex. mastication) ou sa propre voix. Dans tous les cas, la pression acoustique dans le canal auditif est le résultat d’une superposition d’ondes se propageant par voie aérienne dans le canal auditif et par voie solidienne dans les tissus de la tête et le protecteur. En fonction de la nature de l’excitation, les contributions respectives aérienne et solidienne seront plus ou moins importantes. Par exemple en oreille ouverte et une source de bruit externe, la pression acoustique dans le canal sera principalement due à la contribution aérienne. A l’inverse pour une excitation externe ou interne solidienne (voix, ossivibrateur), la pression acoustique dans le canal occlus sera principalement associée à la contribution solidienne.
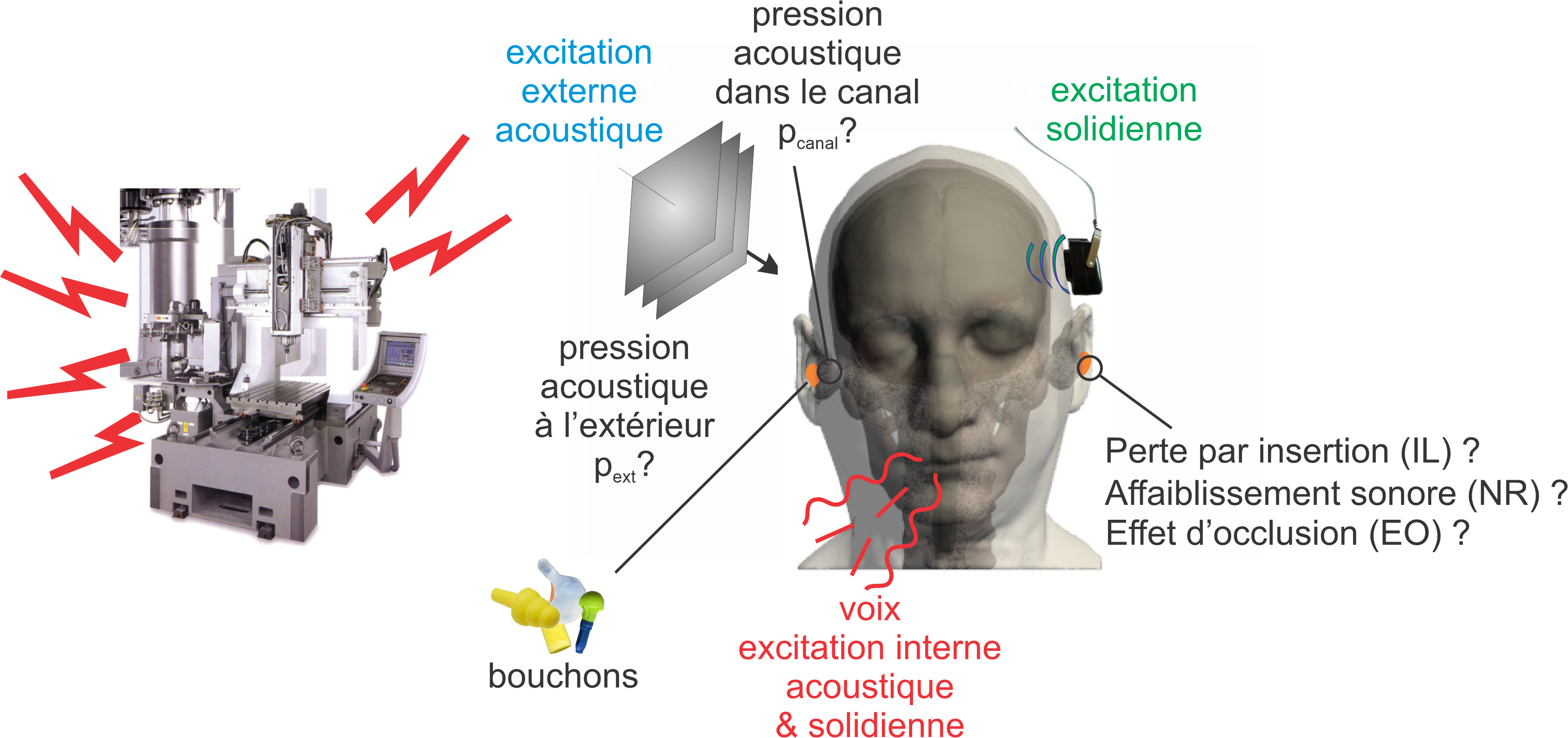
Les ondes se propageant à la fois dans un fluide (l’air ou le fluide cochléaire) et dans des structures solides (tissus de la tête, protecteur auditif) voire poroélastiques (inserts de mousses dans les coquilles des serre-tête), on voit donc qu’on a un problème vibroacoustique poro-élasto-acoustique complexe à résoudre. Plus spécifiquement, dans ce chapitre, on s’intéresse au calcul de la pression acoustique à l’extérieur et à l’intérieur du canal auditif du système « tête seule » ou « tête avec protecteur ». La connaissance de la pression acoustique dans le canal ouvert et occlus pour les deux types d’excitation susmentionnés permet en outre d’en déduire la perte par insertion (IL) du protecteur ainsi que son effet d’occlusion (EO). La détermination du champ de pression acoustique à l’extérieur permet de calculer d’autres indicateurs comme l’affaiblissement sonore (NR). A noter qu’ici on se concentre sur l’oreille externe puisque c’est la seule partie anatomique d’un sujet vivant qui est accessible à des capteurs pour évaluer la pression acoustique à condition bien sûr de respecter les règles d’usage en éthique. Par contre, on tient compte de l’effet de l’oreille moyenne et interne sur la pression acoustique dans le canal auditif .
En fonction de la nature de l’excitation et du type de phénomène à prendre en compte dans le modèle, il peut être souhaitable de résoudre le problème dans le domaine fréquentiel ou dans le domaine temporel. Par exemple, une résolution dans le domaine temporel[4] peut s’avérer plus judicieuse et efficace que dans le domaine fréquentiel pour une excitation par bruits impulsionnels et si des mécanismes non-linéaires interviennent. Dans le cas d’une résolution du problème dans le domaine fréquentiel, il est judicieux d’introduire le formalisme complexe en régime harmonique (une seule fréquence [latex]f=\omega/2\pi[/latex] avec [latex]\omega[/latex] la pulsation). On notera pour le champ de pression acoustique en un point de l’espace [latex]\underline x[/latex] à l’instant [latex]t[/latex],
Enfin, dans le reste de ce chapitre, on suppose que tous les composants du système se comportent de manière linéaire à moins qu’il en soit fait mention autrement. Par ailleurs, seuls les protecteurs passifs i.e n’intégrant pas d’éléments électroniques sont considérés .
Les types de modèles
Dans cette section, on recense les différents types de modèles rencontrés dans la littérature pour résoudre le problème susmentionné, qui se différencient par leur niveau de simplification du système à modéliser. Les travaux mentionnés se concentrent sur la protection auditive mais certaines références relatives à d’autres types d’application, comme l’émission d’un son dans l’oreille, peuvent être citées du fait qu’elles se basent sur ces mêmes types de modèles et comportent des similitudes méthodologiques. On peut par exemple penser aux travaux sur les dispositifs intra-auriculaires comme les aides auditives et écouteurs ou supra-auriculaires comme les casques d’écoute.
Pour chaque type de modèles, on décrit brièvement le principe et on recense, pour le lecteur ou la lectrice intéressé à approfondir ses connaissances, des exemples de travaux associés. À la fin de cette section le Tableau 1 résume les domaines d’application des modèles recensés dans la littérature ainsi que de leurs avantages et limitations.
Modèles analytiques
Dans cette catégorie de modèles, la solution du problème s’exprime sous la forme d’expressions mathématiques contenant des fonctions plus ou moins simples des paramètres du modèle. Ces modèles peuvent se décliner en semi-analytiques, matrices de transfert et constantes localisées, les deux derniers types étant souvent associés au terme « modèles de circuits électro-mécano-acoustiques».
Modèles semi-analytiques
Principe
Les modèles semi-analytiques représentent la solution du problème sous forme d’équations mathématiques qui nécessitent l’utilisation de méthodes numériques pour la résoudre. Cette équation est obtenue en faisant des hypothèses simplificatrices au niveau de la géométrie du problème, et de ses conditions aux limites et de chargement ainsi que des lois de comportement associées. Elle fait généralement intervenir des développements en série.
Exemples de travaux de la littérature
Plusieurs auteurs ont utilisé des modèles semi-analytiques pour étudier le champ de pression dans un canal auditif et comment celui-ci est influencé par la géométrie du canal et la présence de la membrane tympanique en fonction de la fréquence. La plupart des travaux considèrent le canal auditif comme un guide d’onde curviligne dont l’extrémité tympanique est assimilée à une impédance acoustique représentant l’effet acoustique de l’oreille moyenne/interne. Le guide d’onde est caractérisé par son axe curviligne et une section droite dont la surface varie en fonction de sa position le long de cet axe. L’hypothèse de propagation plane dans le guide d’onde est justifiée par le fait que les dimensions transverses du canal sont petites par rapport aux longueurs d’ondes considérées et le rayon de courbure de l’axe curviligne. L’équation de propagation associée est celle de Webster (Eisner, 1967) ou équation des pavillons et est résolue de façon numérique. Cette équation fournit une approximation raisonnable de la solution du champ de pression au niveau de l’axe curviligne jusqu’à 15kHz (Stinson et Daigle, 2005) et suffisamment loin des discontinuités d’impédance (ex. membrane tympanique, entrée du canal, face médiale du bouchon), typiquement quelques millimètres.
Khanna et Stinson ont développé un modèle pour calculer le champ de pression acoustique dans le canal auditif (Khanna et Stinson, 1985). Ce modèle est basé sur l’équation des pavillons à forte courbure et de section droite variable et valide pour des canaux auditifs rigides acoustiquement. Ce modèle a permis de prédire de façon précise le champ acoustique dans des canaux auditifs de chats (Khanna et Stinson, 1985 ; Stinson et Khanna, 1994). Stinson a étendu ce modèle pour prendre en compte l’absorption par la membrane tympanique et a validé cette approche avec des modèles réduits de canaux auditifs humains (Stinson, 1985). Ce modèle permet de prédire la charge acoustique sur le tympan (Stinson et Khanna, 1989) et de calculer la vitesse particulaire, l’intensité acoustique (Stinson et Khanna, 1994) et la pression le long de l’axe courbe des sections droites, mais seulement en valeur constante dans une section droite. Farmer-Fedor et Rabbitt sont les auteurs d’autres modèles analytiques paramétriques de pavillon curvilinéaire, mais supposent eux aussi que les grandeurs sont constantes sur une coordonnée de surface constante (Farmer-Fedor et Rabbitt, 2002). Hudde a proposé une méthode acoustique inverse pour déterminer la variation de la surface de section droite le long du canal en se basant sur l’équation de Webster à partir de plusieurs mesures de pression dans le canal. Le modèle d’onde plane est raisonnable à basses fréquences mais est surtout limité aux hautes fréquences en partie à cause de l’influence des déformées modales complexes de la membrane tympanique et de l’inclinaison de la membrane tympanique (Cheng et al., 2015 ; Hudde, 1983). Rabbitt et Holmes ont ainsi proposé un modèle 3D de la propagation des ondes dans le canal auditif incluant le couplage avec la membrane tympanique (Rabbitt et Holmes, 1988). Ces travaux supposent que le rapport du rayon à la longueur de canal est faible et se basent sur la théorie des guides d’ondes minces. Une méthode de décomposition asymptotique adaptée est utilisée et la solution est exprimée par une superposition modale. Duda et Martens (Duda et Martens, 1998) ont utilisé une méthode semi-analytique basée sur la décomposition en harmoniques sphériques pour calculer la distribution du champ de pression sur un modèle de tête sphérique rigide avec un canal auditif et étudier l’effet de diffraction lié à la tête.
Matrices de transfert
Principe
La seconde classe de modèles analytiques correspond à la méthode des matrices de transfert[5]. Elle assimile chaque élément du système considéré à un guide d’onde unidimensionnel, i.e les ondes se propagent de manière plane[6] le long d’un axe donné, possiblement curviligne et de section variable. Cela signifie que la longueur d’onde dans l’élément est très grande devant les dimensions de sa section droite. Les champs des variables physiques décrivant le problème ne varient donc pas sur cette section.
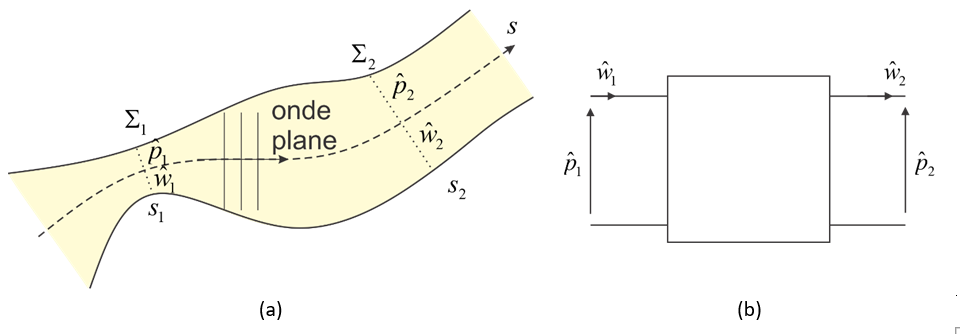
Si l’ on s’intéresse à la propagation d’ondes acoustiques harmoniques dans un guide d’onde fluide entre deux abscisses [latex]s_1[/latex] et [latex]s_2\,\, (s_2>s_1)[/latex] de l’axe de ce guide (voir Figure 3a), on peut relier la pression acoustique [latex]{\hat p}_1[/latex] et le débit acoustique [latex]{\hat w}_1[/latex] qui passe à travers la section droite en [latex]s_1[/latex] à la pression [latex]{\hat p}_2[/latex] et le débit acoustique [latex]{\hat w}_2[/latex] en [latex]s_2[/latex] par un quadripôle[7] (voir Figure 3b) :
Plus spécifiquement, le débit acoustique qui passe à travers une section droite de surface [latex]\Sigma[/latex] est l’intégrale sur la section droite de la composante selon l’axe de propagation (de vecteur unitaire [latex]\underline s[/latex]) de la vitesse particulaire acoustique [latex]{\underline {\hat v} _a}[/latex] ce qui dans le cas présent donne [latex]\hat w = {\underline {\hat v} _a}.\underline s {\kern 1pt} \Sigma = {\hat v_{a,s}}\Sigma[/latex].
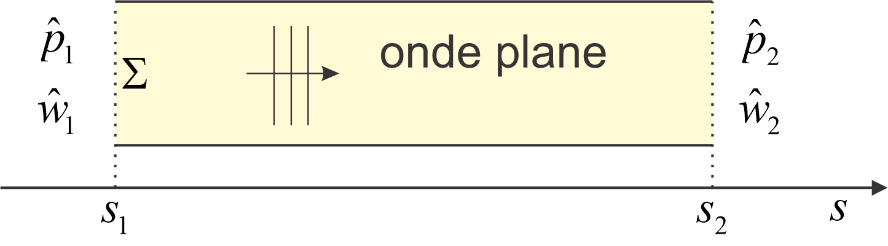
La matrice qui relie le vecteur d’entrée à celui de sortie est appelée matrice de transfert et ses composantes caractérisent entièrement l’élément. Ces termes dépendent des dimensions et propriétés physiques de chaque élément. Ils peuvent être mesurés (ex (Hiselius, 2004, 2005, 2006 ; Hudde, 1983) ou calculés (Allard et Atalla, 2009). Par exemple dans le cas d’une portion de guide d’onde acoustique (non dissipatif) droit, à section constante de surface [latex]\Sigma[/latex] comprise entre les deux abscisses [latex]s_1[/latex] et [latex]s_2[/latex] (voir Figure 4), on a :
où [latex]{Z_c} = \frac{{{\rho _0}{c_0}}}{\Sigma }[/latex] est l’impédance acoustique caractéristique du milieu et [latex]k = \frac{\omega }{{{c_0}}}[/latex] le nombre d’onde.
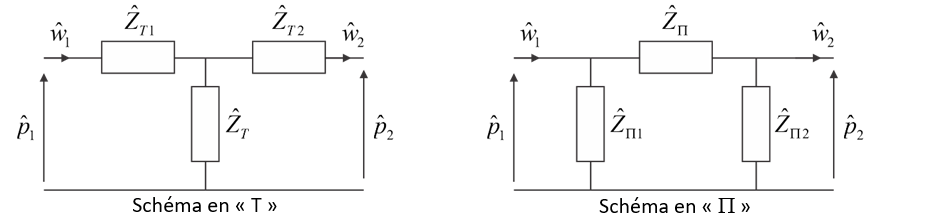
Un quadripôle peut également être représenté par un circuit électrique équivalent composés de dipôles[8] (ou impédances) avec par exemple un schéma de type « T » ou « [latex]\Pi[/latex]» (voir Figure 5). Plusieurs analogies acousto-mécano-électriques existent. L’analogie directe (ou analogie impédance) consiste à faire correspondre à la vitesse d’une masse acoustique/mécanique le courant électrique et associer une impédance électrique à une impédance acoustique/mécanique. Une masse acoustique/mécanique est alors associée à une inductance alors que la compressibilité acoustique/raideur mécanique est représentée par une capacitance. L’analogie inverse (ou analogie admittance) consiste à faire correspondre la tension électrique à la vitesse d’une masse acoustique/mécanique et associer une admittance électrique à une impédance acoustique/mécanique. Une masse acoustique/mécanique est alors associée à une capacitance alors que la compressibilité acoustique/raideur mécanique est représentée par une inductance. Dans les deux types d’analogie, la résistance acoustique/mécanique qui traduit un effet dissipatif dû aux frottements de l’élément est associée à une résistance électrique.
Par exemple les éléments matriciels de (1.1) sont reliés à ceux du système en « T » par :
avec
Remarque 1 : Le système d’équations (1.1) peut se réécrire (Hiselius, 2004)
et les termes de la matrice correspondent alors à des impédances acoustiques. On ne parle donc plus de matrice de transfert mais de matrice d’impédance.
In fine, un guide d’onde peut être modélisé comme une série de quadripôles en série dont l’entrée est reliée à la sortie par un produit des matrices de transfert de chaque quadripôle. L’imposition des conditions limite à l’entrée et à la sortie du système permet d’obtenir la solution par l’inversion de la matrice globale. Les pressions et débits peuvent alors être calculés simplement sans avoir recours à des méthodes de résolution numérique.
Remarque 2 : Il peut arriver que le système soit représenté par des quadripôles connectés à des impédances (ou dipôles), par exemple un guide d’onde connecté en parallèle à un résonateur de Helmholtz caractérisé par son impédance (Hansen, 1998 ; Hudde et Engel, 1998a ; Luan et al., 2019). Dans ce cas, on peut montrer qu’on peut remplacer le dipôle par un quadripôle de manière à pouvoir utiliser la propriété de multiplication des matrices de transfert. Par exemple si un dipôle (impédance [latex]\hat Z[/latex]) est connecté aux 2 ports de sortie d’un quadripôle, ce dipôle peut être représenté par un quadripôle dont la matrice est donnée par [latex]\left( {\begin{array}{*{20}{c}} 1&0\\ 1/\hat{Z}&0 \end{array}} \right)[/latex]. Si ce même dipôle est placé en série au port d’entrée d’un quadripôle, il peut être représenté par un quadripôle dont la matrice est donnée par [latex]\left( {\begin{array}{*{20}{c}} 1&{\hat Z}\\ 0&1 \end{array}} \right)[/latex].
Remarque 3 : On peut introduire de la dissipation par effets visqueux et thermiques dans le fluide en utilisant un nombre d’onde et d’une impédance caractéristique complexes. Ça peut être le cas pour un matériau poreux acoustique modélisé comme un fluide équivalent (rigide ou « limp ») ou un guide d’onde de petite section (générant des dissipations visco-thermiques au niveau des parois du canal et ce, dans la gamme de fréquence audible souvent considérée).
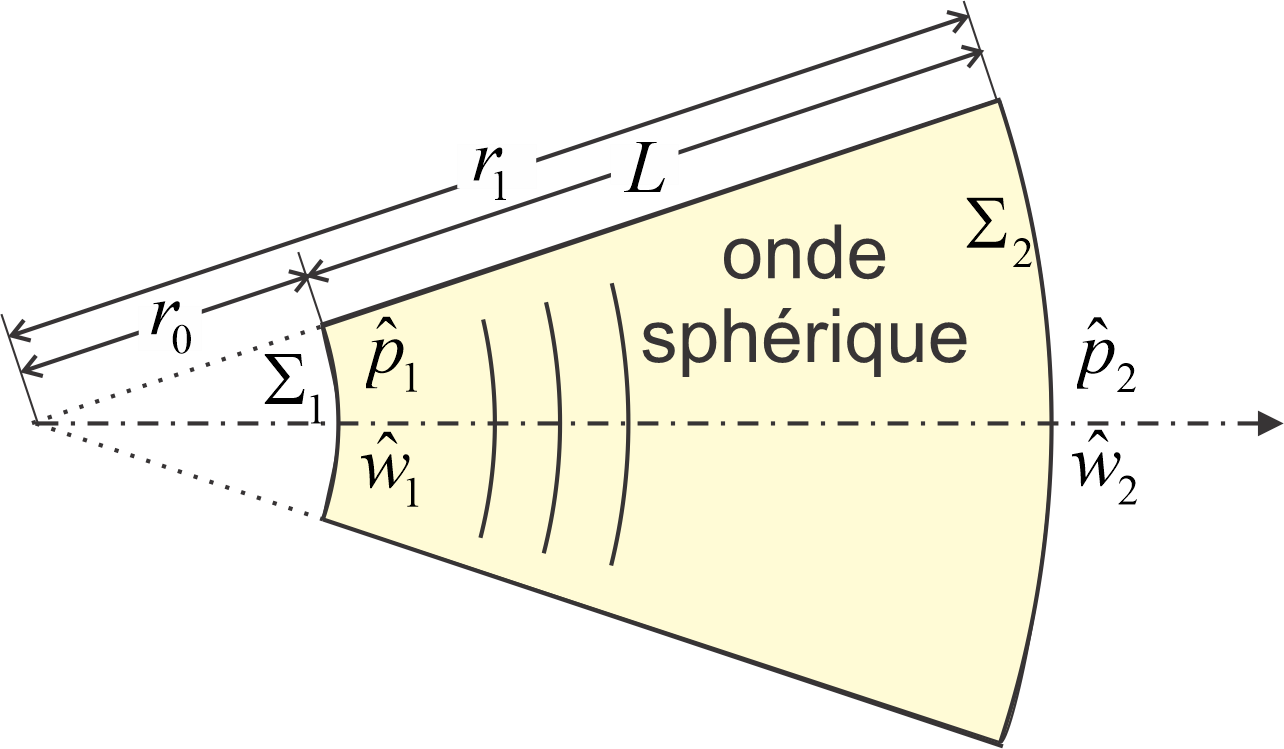
Remarque 4 : Dans le cas d’un guide d’onde à section variable, on peut discrétiser ce dernier en éléments cylindriques à section constante (voir Eq(1.2) pour la matrice de transfert associée) supposant une propagation d’ondes planes ou bien en éléments tenant compte de la variation de section (ex. éléments coniques) supposant une propagation d’onde sphérique. Dans ce dernier cas (voir Figure 6), la matrice de transfert est donnée par Eq(1.7). En utilisant ce type d’élément, la méthode peut s’avérer beaucoup plus efficace sur le plan numérique car le nombre d’éléments coniques nécessaires pour faire converger la solution est très inférieur au nombre d’éléments cylindriques (Kulik, 2007 ; Mapes-Riordan, 1991).
Exemples de travaux de la littérature
La propagation dans les canals ouverts et occlus a été modélisée à l’aide de la méthode des matrices de transfert par plusieurs auteurs.
Hudde a utilisé une représentation par matrice de transfert combinée à l’équation de Webster pour évaluer par méthode inverse l’évolution de la surface de la section droite d’un canal auditif ouvert en fonction de sa position sur son axe curviligne (Hudde, 1983).
Les modèles de matrice de transfert ont également été utilisés pour développer des simulateurs d’oreille pour des tests d’aides auditives (Egolf et al., 1992), des tests d’écoute (Hiipakka, 2008), pour proposer une méthodologie de conception d’un simulateur d’oreille occlus (Rodrigues et al., 2015), pour calculer l’impédance d’entrée du simulateur d’oreille EIC 60318-4 sur la base d’une évaluation directe de ses dimensions géométriques ainsi que l’impédance tympanique équivalente (Luan et al., 2019), pour décrire la propagation du son dans l’appareil auditif complet (Hudde et Engel, 1998a, 1998b, 1998c) et pour calculer l’impédance d’entrée de l’oreille ouverte (Withnell et Gowdy, 2013).
D’autres travaux se sont intéressés à l’atténuation des protecteurs (Schroeter et Poesselt, 1986 ; Hiselius, 2004, 2005, 2006), l’effet d’occlusion des protecteurs (Schroeter et Poesselt, 1986) et d’aides auditives (Hansen, 1998 ; Zurbrügg et al., 2014). Schroeter & Poesselt ont développé un modèle de matrices de transfert pour évaluer l’erreur sur la perte par insertion de protecteurs, d’aides auditives et la sensibilité de casques due à une reproduction incorrecte de l’impédance terminale d’une ATF (Schroeter et Poesselt, 1986). Ce modèle a également été utilisé pour étudier les effets de conduction osseuse (effet d’occlusion et masquage physiologique) dus à un protecteur auditif pour une source interne (bruit physiologique). Dans le but de prédire l’atténuation, Hiselius a mesuré les matrices de transfert de plusieurs types de bouchons en les insérant à l’extrémité d’un tube cylindrique excité acoustiquement par un haut-parleur à l’autre extrémité et en effectuant une mesure de pression en amont et en aval du bouchon pour deux impédances terminales différentes (Hiselius, 2004, 2005, 2006). Le bouchon est soit inséré dans un porte échantillon à parois rigides cylindrique de section constante (Hiselius, 2004) ou variable (Hiselius, 2005) pour se rapprocher de l’insertion dans un canal auditif géométriquement réaliste. Cette méthode valide pour des dispositifs dont l’impédance d’entrée est grande devant l’impédance de rayonnement de la face arrière (ce qui est le cas pour les bouchons) évite la mesure des débits en amont et en aval.
D’autres auteurs ont proposé des modèles de l’effet d’occlusion induit par les aides auditives (Zurbrügg et al., 2014) et les moules d’aides auditives (Hansen, 1998) pour une excitation par la voix, considérant de ce fait une excitation simultanée par voie aérienne et par conduction osseuse. Ces modèles ont été étudiés pour comprendre le rôle du dispositif d’occlusion, l’effet de la profondeur d’insertion et celui des facteurs géométriques du canal auditif et des évents sur l’effet d’occlusion. Dans les travaux précédents, le canal auditif est modélisé comme une succession de matrices de transfert de tubes cylindriques aux parois rigides incluant les effets viscothermiques (Luan et al., 2019 ; Zurbrügg et al., 2014) ou non (Hansen, 1998 ; Hudde et Engel, 1998a, 1998b, 1998c ; Schroeter et Poesselt, 1986). L’oreille moyenne est décrite par une série de matrices de transfert (Hudde et Engel, 1998a, 1998b, 1998c ) ou par une impédance équivalente constituée d’éléments à constantes localisées comme par exemple celle de Stirnemann (Stirnemann, 2011), Kringlebotn (Kringlebotn, 1988) ou Shaw et Stinson (Hahn, 1985 ; Shaw et Stinson, 1981, 1983). Dans le cas de l’oreille ouverte, une impédance de rayonnement d’un tube bafflé ou celle de Hudde est imposée à l’entrée du canal. Dans le cas où les effets de conduction osseuse (effet d’occlusion et masquage physiologique) induits par le bruit physiologique (Schroeter et Poesselt, 1986) ou la voix (Hansen, 1998 ; Zurbrügg et al., 2014) sont étudiés, une ou plusieurs sources de débit volumique internes sont introduites pour représenter la contribution des vibrations de la partie cartilagineuse du canal (Hansen, 1998 ; Schroeter et Poesselt, 1986 ; Zurbrügg et al., 2014) et celle des parois de la cavité de l’oreille moyenne (Schroeter et Poesselt, 1986). Les amplitudes de ces sources sont estimées à partir de mesure sur des cadavres. Les dispositifs d’occlusion sont modélisés comme une impédance infinie[9]. (Hansen, 1998 ; Zurbrügg et al., 2014) ou comme celle d’une tube étroit en présence d’évents (Hansen, 1998 ; Zurbrügg et al., 2014), comme une matrice de transfert (bouchons dans (Hiselius, 2004, 2005) ou une combinaison de constantes localisées (coquilles dans (Schroeter et Poesselt, 1986), bouchons dans (Hiselius, 2004, 2005)) (voir section Modèles à constantes localisées) ou décrits par une impédance mesurée expérimentalement (bouchons dans (Schroeter et Poesselt, 1986)).
Modèles à constantes localisées
Principe
Lorsque la longueur d’onde dans l’élément est très grande devant sa plus grande dimension notée [latex]L[/latex] ([latex]kL \ll 1[/latex]), son comportement acoustique peut être représenté par celui d’une masse, raideur ou résistance. D’autres éléments comme des transformateurs ou des girateurs peuvent être nécessaires comme par exemple dans la modélisation de l’oreille moyenne. On parle alors de modèle à constante localisée ou « lumped parameters models » en anglais. La dépendance spatiale des variables est éliminée. En d’autres termes seules les variables en entrée et en sortie de l’élément suffisent à décrire son comportement. Avec cette représentation et à l’instar des modèles de matrices de transfert, un système peut être caractérisé par un circuit électrique constitué d’éléments simples de type inductance, capacités et résistance. Là encore, la détermination des pressions et débits se fait sans avoir recours à des méthodes de résolution numérique.
Remarque 5 : Les grandeurs physiques varient de façon linéaire entre l’entrée et la sortie de l’élément. En d’autres termes les dérivées partielles peuvent s’écrire comme des différences finies.
Remarque 6 : Lorsque la longueur de l’élément considéré ne peut plus être considérée grande devant la longueur d’onde, il est possible de discrétiser ce dernier en petits éléments en série pour lesquels cette hypothèse sera vérifiée et qui chacun, vont pouvoir être représentés par des constantes localisées. Ainsi lorsque le canal auditif est discrétisé le long de son axe curviligne en une infinité d’éléments à constantes localisées, la solution converge vers la solution de l’équation de Webster.
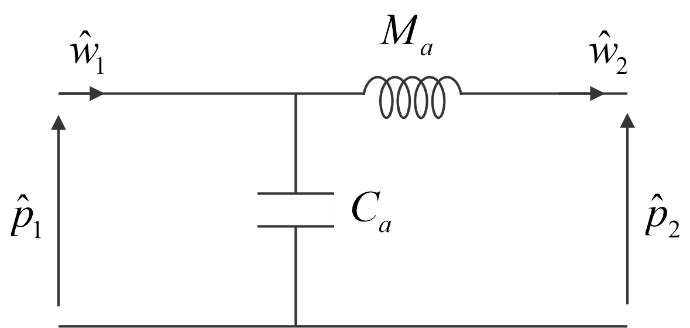
A titre d’exemple, si on considère le comportement acoustique en basses fréquences d’une portion de tube de fluide entre les abscisses [latex]s_1[/latex] et [latex]s_2[/latex] (voir Figure 4), on peut montrer qu’on a les relations suivantes :
| [latex]{\hat p_1} - {\hat p_2} \approx i\omega \frac{{{\rho _0}L}}{\Sigma }\hat w = i\omega {M_a}\hat w[/latex] | (1.8) |
| [latex]{\hat w_1} - {\hat w_2} \approx i\omega \frac{V}{{{\rho _0}c_0^2}}\hat p = i\omega {C_a}\hat p[/latex] | (1.9) |
où [latex]L = s_2-s_1[/latex], [latex]V=\Sigma L[/latex], [latex]\hat w = \hat w_1 = \hat w_2[/latex] et [latex]\hat p= \hat p_1 = \hat p_2[/latex]. L’équation (1.8) traduit l’effet inertiel du fluide caractérisé par son débit [latex]\hat w[/latex] et sa masse acoustique [latex]M_a[/latex][kgm-4][10] et associé à une chute de pression. L’équation (1.9) traduit l’effet de compressibilité du fluide contenu dans le volume [latex]V[/latex] et caractérisé par sa pression acoustique [latex]\hat p[/latex] et sa souplesse acoustique[11] [latex]C_a[/latex] [m5N-1] et associé à la chute de débit. On peut associer un circuit électrique équivalent (Figure 7).
Il est intéressant de noter qu’en fonction du type de terminaison, le comportement du tube sera dominé par l’effet inertiel ou l’effet de compressibilité. Ainsi si on impose que le guide d’onde soit fermé en [latex]s_2[/latex] alors [latex]\hat w_2=0[/latex] et le comportement du guide est assimilable à celui d’un pur ressort (souplesse acoustique). A l’inverse si le guide d’onde est ouvert en [latex]s_2[/latex] alors de façon approximative [latex]\hat p_2 = 0[/latex] et le comportement du guide est assimilable à celui d’une masse acoustique incompressible.
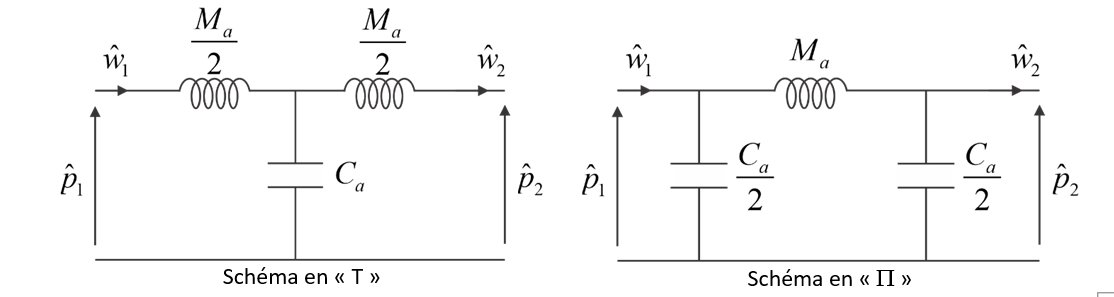
En utilisant le formalisme des matrices de transfert en basse fréquence, on peut obtenir les schémas en « T » et en « [latex]\Pi[/latex] » associés. Ainsi, en utilisant le fait que dans ces conditions [latex]\tan \frac{{k\left( {{s_2} - {s_1}} \right)}}{2} \approx \frac{{k\left( {{s_2} - {s_1}} \right)}}{2}[/latex] et [latex]\sin \frac{{k\left( {{s_2} - {s_1}} \right)}}{2} \approx \frac{{k\left( {{s_2} - {s_1}} \right)}}{2}[/latex] alors (1.4) et (1.5) se réécrivent respectivement :
et
On aboutit aux schémas équivalents de la Figure 8.
Sur le même principe, des modèles à constantes localisées mécaniques peuvent être utilisés pour décrire le comportement acoustique de protecteurs auditifs.
Exemples de travaux de la littérature
Les simulateurs d’oreille sont souvent décrits par des circuits électriques à constantes localisées (Brüel & Kjaer, 2015 ; Hiipakka, 2008 ; IEC 60318-4, 2010 ; Zuercher et Burkhard, 1976). Plusieurs modèles à constantes localisées de l’impédance tympanique qui représente l’effet acoustique des oreilles moyenne et interne ont été publiés (Kringlebotn, 1988 ; Pascal et al., 1998 ; Shaw, 1977 ; Shaw et Stinson, 1981, 1983 ; Zwislocki, 1962). Gardner a étudié la discrétisation en éléments à constantes localisées d’un canal auditif cylindrique à section constante ou décroissante soumise à une excitation acoustique pour représenter adéquatement son comportement acoustique (Gardner et Hawley, 1972).
Plusieurs auteurs se sont intéressés à la réponse du canal occlus par un bouchon en vue prédire son atténuation (Fedele et Kalb, 2015 ; Hahn, 1985 ; Hiselius, 2005 ; Kalb, 2010). Généralement, cette dernière est considérée comme le résultat de deux chemins de transmission. Le premier est dû au mouvement du bouchon considéré comme une masse rigide couplée à une raideur et un amortissement induit par la peau en contact avec le bouchon. Le second résulte de la présence de fuites acoustiques à l’interface peau/bouchon. Kalb étend la validité du modèle à constantes localisées en plus hautes fréquences en introduisant un troisième chemin associé aux modes élastiques du bouchon et décrit par une impédance (Kalb, 2010). Cette impédance ainsi que certains paramètres de raideur et résistance associé à la coquille et ceux associés à la fuite sont recalés à partir de la minimisation de l’erreur entre atténuation calculée et mesures de REAT[12].
Il est alors en mesure d’identifier la contribution de chaque chemin acoustique à l’atténuation du bouchon. Grâce aux paramètres identifiés dans le domaine fréquentiel il résout le système d’équations différentielles associées dans le domaine temporel pour du bruit impulsionnel afin d’obtenir la forme d’onde dans le canal occlus et calculer le risque auditif pour chacun des bouchons grâce au modèle AHAAH. Fedele étend le modèle électroacoustique aux bouchons non-linéaires (Fedele et Kalb, 2015). Hahn prédit la réponse en fréquence ou la réponse impulsionnelle de l’oreille occluse par un bouchon ainsi que l’atténuation de ce dernier en tenant compte du couplage entre la peau du canal auditif et le bouchon sous la forme d’une impédance mécanique dans un circuit électrique équivalent (Hahn, 1985). L’impédance tympanique est celle de Shaw (Shaw, 1977 ; Shaw et Stinson, 1981, 1983). À partir de mesures de matrices de transfert de bouchons, Hiselius a identifié les constantes localisées associées aux terme de la matrice identifiés expérimentalement puis a couplé le réseau en « P » correspondant, à une souplesse acoustique dans le cas du canal occlus (Hiselius, 2004). L’impédance tympanique retenue est celle de Kringleton (Kringlebotn, 1988). En oreille ouverte, il représente le canal par une impédance d’entrée selon le modèle de Hudde et Engel (Hudde et Engel, 1998c).
L’atténuation des coquilles en basses fréquences typiquement en dessous de 1kHz, est fréquemment représentée par des modèles à constantes localisées (Boyer et al., 2015 ; Buck, 2000, 2009 ; Du et Homma, 2009 ; Gorman, 1982 ; Kalb, 2010, 2013 ; Paurobally et Pan, 2000 ; Shaw et Thiessen, 1958, 1962 ; Sides, 2004 ; Zwislocki, 1955). La transmission sonore à travers la coquille peut être considérée comme résultant de la superposition de 3 chemins. Le premier est dû au mouvement de pompage de la coquille (Boyer et al., 2015 ; Buck, 2000, 2009 ; Du et Homma, 2009; Kalb, 2010, 2013 ; Paurobally et Pan, 2000 ; Shaw et Thiessen, 1958, 1962 ; Sides, 2004 ; Zwislocki, 1955), le second aux fuites acoustiques à l’interface peau-coussin (Buck, 2000, 2009 , p. 200 ; ; Kalb, 2010, 2013 ; Paurobally et Pan, 2000 ; Shaw et Thiessen, 1958 ; Sides, 2004) et le troisième dû aux modes élastiques de la coquille dans lequel peuvent être inclus la transmission à travers le coussin et la conduction osseuse dans le canal auditif (Buck, 2000, 2009 ; Kalb, 2010). Ce dernier chemin permet d’étendre la validité du modèle constantes localisées en plus hautes fréquences. En suivant la même procédure de recalage des paramètres du modèle que pour les bouchons, Kalb analyse la contribution des trois chemins et calcule également la forme d’onde sous la coquille due à une excitation par un bruit impulsionnel de fusil pour calculer le risque auditif associé grâce au modèle AHAAH (Kalb, 2010) . Certains modèles considèrent la présence de l’insert en mousse dans la coquille sous forme de souplesse acoustique (Paurobally et Pan, 2000). Typiquement, dans ces travaux, la coquille fait intervenir des paramètres comme le volume de sa cavité interne, la surface recouverte par la coquille, un terme tenant compte de l’épaisseur de la coquille, sa masse équivalente, la raideur et l’amortissement du coussin de confort et la raideur de la chair en contact avec le coussin. Chacun de ces termes est associé à une inductance, souplesse ou résistance.
Les modèles à constantes localisées ont également été utilisés pour prédire l’effet d’occlusion objectif induit par des bouchons d’oreille. Le canal auditif est représenté par une masse acoustique (respectivement souplesse acoustique) entre la source de débit acoustique et l’entrée du canal (respectivement la membrane tympanique) (Carillo et al., 2020a ; Tonndorf, 1972) ou par des réseaux de circuits en T symétriques contenant des masses acoustiques, une souplesse acoustique et trois résistances pour tenir compte des effets viscothermiques dont les dimensions correspondent à des données moyennes de canaux auditifs (Stenfelt et Reinfeldt, 2007). Différents modèles d’impédance tympanique sont utilisés comme celui de Hudde et Engel (Hudde et Engel, 1998c) ou Shaw & Stinson (Shaw et Stinson, 1983). Dans le cas de l’oreille ouverte, l’impédance de rayonnement à l’entrée du canal auditif ouvert est décrite par le modèle de Hugge et Engel (Hudde et Engel, 1998c) ou celle d’un piston bafflé (Bruneau, 2006). La plupart des auteurs utilisent une source unique de débit volumique interne pour représenter la contribution des vibrations de la partie cartilagineuse du canal (Carillo et al., 2020a ; Stenfelt et Reinfeldt, 2007; Tonndorf, 1964). Stenfelt & Reinfelt ajoutent également une seconde source dans la partie osseuse (Stenfelt et Reinfeldt, 2007). Les amplitudes des sources sont recalées à partir de données expérimentales (Stenfelt et Reinfeldt, 2007 ; Tonndorf, 1964) ou estimées à l’aide d’une modèle numérique détaillé (Carillo et al., 2020a, 2021a). Les bouchons sont assimilés à une impédance infinie (Tonndorf, 1964 ; Stenfelt et Reinfeldt, 2007 ; Carillo et al., 2020a ; Brummund et al., 2014) ou leur comportement dynamique est pris en compte par un modèle numérique détaillé (Brummund et al., 2014, 2015 ; Carillo et al., 2021a) . Dans le cas d’une sollicitation par conduction osseuse, les points de la paroi du canal auditif situées au niveau de la section droite de l’entrée du canal auditif et de la membrane tympanique, vibrent en phase (sans se déformer) autour de leur position d’équilibre en basses fréquences. Il est alors important de prendre en compte la vitesse relative du fluide par rapport à celle des parois du canal dans la définition des impédances acoustiques de l’entrée du canal auditif et de la membrane tympanique. Ainsi, dans l’étude des fonctions de transfert de l’oreille ouverte et occluse ainsi que de l’effet d’occlusion, Kersten et coll montrent l’importance de tenir compte non seulement des vibrations des parois du canal auditif qui joue le rôle de source de débit acoustique mais également des mouvements structurels des parois du canal à l’entrée et à la membrane tympanique (Kersten et al., 2024). En particulier l’amplitude de la pression acoustique diminue en basses fréquences quand les impédances sont définies en considérant ces mouvements par rapport au cas où ils sont négligés. L’impact est plus prononcé dans le cas de l’oreille occluse ce qui amène à une réduction de l’effet d’occlusion.
Modélisation numérique
Les hypothèses liées aux simplifications géométriques et physiques des modèles analytiques précédents ne permettent pas l’évaluation précise du champ sonore dans le canal auditif et du champ de déplacement des tissus et du protecteur, ainsi que la compréhension fine des mécanismes complexes de propagation sonore dans le système de l’oreille couplé au protecteur. Alternativement, le recours à un modèle numérique détaillé, basé sur la mécanique des milieux continus permet de relaxer les hypothèses des modèles précédents et d’avoir accès à des informations complémentaires qui peuvent aider à mieux comprendre la physique.
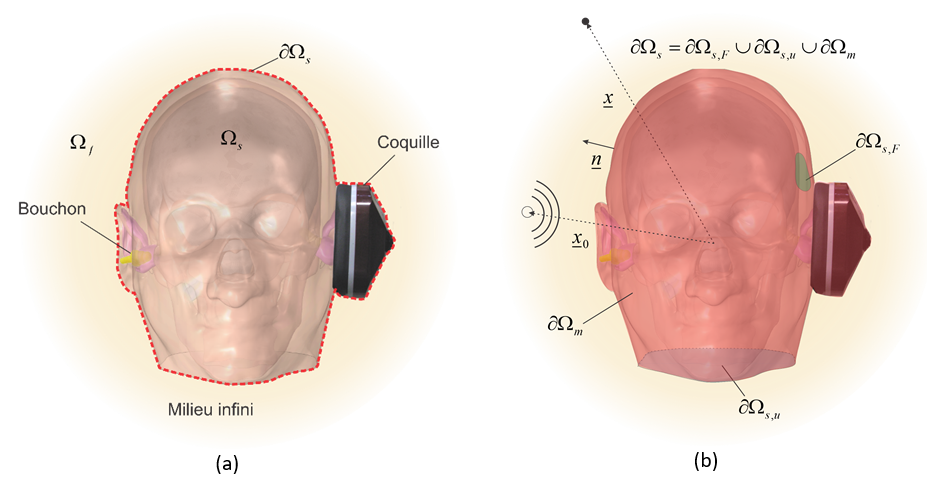
Dans le cadre de la modélisation numérique, on résout un problème de mécanique[13] des milieux continus à l’aide d’une méthode numérique. Considérons la configuration générale décrite sur la Figure 9a d’une tête équipée de protecteurs auditifs et immergée dans un milieu infini contenant de l’air représenté par le domaine fluide [latex]\Omega_f[/latex]. Lorsqu’on cherche à déterminer la pression dans un fluide [latex]\Omega_f[/latex] non borné (comme c’est le cas ici), on parle de problème extérieur. Dans le cas d’un fluide [latex]\Omega_f[/latex] borné, on parle de problème intérieur. Pour illustrer le caractère général du problème, la Figure 9a présente une situation hypothétique où l’oreille droite est équipée d’une partie d’un protecteur supra-auriculaire (une des coquilles d’un serre-tête sans arceau) et l’oreille gauche d’un protecteur intra-auriculaire (bouchon). La tête et les protecteurs sont représentés par le domaine solide [latex]\Omega_s[/latex][14] dont l’enveloppe est notée [latex]\partial \Omega_s[/latex] représentée schématiquement en pointillés rouges sur la Figure 9a. Cette enveloppe en contact avec le fluide environnant peut être décomposée en trois portions (voir Figure 9b). La première, notée [latex]\partial \Omega_{s,F}[/latex] (en vert sur la figure), est la surface sur laquelle est imposée une force surfacique mécanique [latex]\underline {\hat F}[/latex] (par exemple une force induite par un ossivibrateur). La seconde, notée [latex]\partial \Omega_{s,u}[/latex] (en gris sur la figure), correspond à une surface où un déplacement [latex]\underline {\hat {\bar u}}[/latex] est imposé, par exemple en bloquant les déplacements à 0 à la base de la tête pour simuler un encastrement. Enfin le reste de l’enveloppe [latex]\partial \Omega_s[/latex] appelée [latex]\partial \Omega_m[/latex] (en rouge sur la figure), correspond au reste de l’interface fluide-solide . Le domaine fluide est excité de façon acoustique par une source ponctuelle d’amplitude [latex]\hat A[/latex] positionnée en un point [latex]\underline{x}_0[/latex] dans l’air environnant.
En régime harmonique de pulsation [latex]\omega[/latex] en supposant une dépendance en [latex]e^{i\omega t}[/latex] les équations différentielles associées à ce problème en tout point [latex]\underline x[/latex] s’écrivent :
où [latex]\underline {\hat u}[/latex] est le champ de déplacement du domaine solide [latex]\Omega_s[/latex], [latex]\underline{\underline {\hat \sigma }}[/latex] est le tenseur des contraintes, [latex]\rho_s[/latex] est la densité de [latex]\Omega_s[/latex], [latex]\underline{n}[/latex] est la normale à [latex]\partial \Omega_s[/latex] pointant dans [latex]\Omega_f[/latex], [latex]\hat{p}[/latex] est la pression acoustique totale dans [latex]\Omega_f[/latex], [latex]\rho_0[/latex] est la masse volumique de [latex]\Omega_f[/latex], [latex]r = \left| {\underline x } \right|[/latex] et [latex]k = \frac{\omega }{{{c_0}}}[/latex] est le nombre d’onde acoustique dans [latex]\Omega_f[/latex]. [latex]\delta \left( {\underline x - {{\underline x }_0}} \right)[/latex] est la distribution de Dirac et a pour propriété que [latex]\int_{{\Omega _f}} {\delta \left( {\underline x - {{\underline x }_0}} \right)dV} = 1[/latex] si [latex]{\underline x _0} \in {\Omega _f}[/latex] et 0 sinon. [latex]\underline \nabla .[/latex] représente l’opérateur de divergence et [latex]\nabla^2[/latex] celui du Laplacien. [latex]\frac{{\partial \hat p}}{{\partial n}}[/latex] représente la dérivée normale de [latex]\hat{p}[/latex] et est égale à [latex]\nabla \hat p.\underline n[/latex] où [latex]\nabla \hat{p}[/latex] dénote le gradient de [latex]\hat{p}[/latex].
L’Eq.(1.12)a représente l’équation de l’élastodynamique linéaire. L’Eq.(1.12)b correspond à une force mécanique par unité de surface appliquée au domaine solide. L’Eq.(1.12)c traduit la continuité des tractions à l’interface fluide-solide [latex]\partial {\Omega _m} \cup \partial {\Omega _{s,F}}[/latex]. Sur [latex]\partial \Omega_m[/latex] , le second membre représente la force par unité de surface agissant sur [latex]\Omega_s[/latex] due à l’excitation acoustique et au rayonnement acoustique de [latex]\Omega_s[/latex] dans [latex]\Omega_f[/latex]. Sur [latex]\partial\Omega_{s,F}[/latex] , la composante normale de la force surfacique [latex]\underline {\hat F}[/latex] impose la pression acoustique. L’Eq.(1.12)d correspond aux déplacements imposés. L’Eq.(1.12)e est l’équation de Helmholtz. L’Eq.(1.12)f représente la continuité des déplacements normaux acoustique et solide au niveau de l’interface fluide-solide [latex]\partial \Omega_m[/latex] et l’imposition du déplacement acoustique normal à la composante normale du déplacement [latex]\underline {\hat{\bar u}}[/latex] sur [latex]\partial {\Omega _{s,u}}[/latex]. Enfin, l’Eq.(1.12)g décrit la condition de Sommerfeld.
A la différence des modèles analytiques recensés précédemment, qui font disparaitre certaines dépendances spatiales des variables, les modèles numériques considèrent la géométrie des domaines à part entière et permettent d’avoir accès aux champs associés. Le point de départ de ces modèles est la formulation du problème aux valeurs limites qui rassemble les équations aux dérivées partielles et les conditions aux limites et initiales des variables qui décrivent le système (par exemple dans notre cas, la pression acoustique dans l’air et les champs de déplacement dans le protecteur et les tissus de la tête). Ces équations sont ensuite exprimées sous forme intégrale et discrétisées pour aboutir à un système d’équations algébriques qui est ensuite résolu avec un ordinateur. Pour résoudre numériquement le problème de la Figure 9 qui nous intéresse ici, les méthodes les plus utilisées sont les différences finies, la méthode des éléments finis (Finite Element Method (FEM)) et la méthode des éléments finis de frontière (Boundary Element Method (BEM)).
Méthode des différences finies
Principe
La méthode des différences finies, aussi appelée Finite Difference Time Domain (FDTD) en anglais, opère dans le domaine temporel. Elle consiste à approcher les dérivées apparaissant dans le problème continu par des différences ou combinaisons de valeurs ponctuelles de la fonction en un nombre fini de points discrets ou nœuds du maillage, divisées par un pas spatial ou temporel. Dans cette méthode, le domaine de calcul est découpé en cellules régulières (maillage) sur lesquelles la pression acoustique et la vitesse particulaire sont discrétisées avec un certain pas spatial. La discrétisation de l’axe temporel est également effectuée en un certain nombre de pas de temps. Les opérateurs de dérivation spatiale et temporelle sont alors approchés par des différences finies d’ordre donné. Les grilles pour chacune des variables sont décalées à la fois dans l’espace et dans le temps. A chaque pas de temps, une équation algébrique est obtenue en chaque nœud du maillage interne en imposant que l’équation aux dérivées partielles y soit satisfaite et en écrivant les conditions aux limites aux nœuds sur la frontière ainsi que les conditions initiales. Un système d’équation récursif est obtenu où les valeurs de la solution en chaque nœud du maillage et à un instant donné sont fonction seulement de ses valeurs à des instants précédents (schéma explicite[15]) ou également de ses valeurs au même instant (schéma implicite[16]).
A titre d’exemple, considérons l’équation d’onde à une dimension.
En choisissant une discrétisation de [latex][0,L][/latex] en [latex]M[/latex] intervalles de longueur [latex]\Delta x = \frac{L}{M}[/latex] et [latex][0,T][/latex] en [latex]N[/latex] intervalles de longueur [latex]\Delta t = \frac{T}{N}[/latex] et en notant [latex]x_i =i\Delta x[/latex], [latex]t^n=n\Delta t[/latex] et [latex]p^n_i[/latex] la valeur de la pression acoustique au point [latex]x_i[/latex] et au temps [latex]t^n[/latex], un schéma aux différences finies explicite en temps et centré en espace prendra la forme :
Ce schéma est bien explicite car la valeur [latex]p_i^{n+1}[/latex] peut être obtenue par récurrence en fonction des valeurs de la pression acoustique à des instants précédents et des nœuds adjacents :
| [latex]p_i^{n + 1} = 2\left( {1 - CF{L^2}} \right)p_i^n + CF{L^2}\left( {p_{i - 1}^n + p_{i + 1}^n} \right) - p_i^{n - 1}[/latex] | (1.15) |
avec [latex]CFL = {c_0}\frac{{\Delta t}}{{\Delta x}}[/latex] . On peut montrer que l’erreur de troncature tends vers 0 lorsque [latex]\Delta x[/latex] et [latex]\Delta t[/latex] tendent vers 0. On dit que le schéma d’ordre 2 est consistant. La condition pour que le schéma soit stable[17] est que le paramètre [latex]CFL[/latex] soit strictement inférieur à 1. Cette condition se nomme condition de Courant-Friedrichs –Lewy.
Un autre type de schéma implicite décentré en temps et centré en espace s’écrira
On obtient un système à résoudre de la forme [latex]\left[ A \right]\left\{ {p_{}^{n + 1}} \right\} = \left[ B \right]\left\{ {p_{}^n} \right\} + \left[ C \right]\left\{ {p_{}^{n - 1}} \right\}[/latex] où les vecteurs [latex]\left\{ {p_{}^{n + 1}} \right\}[/latex], [latex]\left\{ {p_{}^{n}} \right\}[/latex] et [latex]\left\{ {p_{}^{n - 1}} \right\}[/latex] contiennent les valeurs aux nœuds à chaque pas de temps. Ce schéma d’ordre 2 est consistant et inconditionnellement stable. L’avantage de cette approche est sa grande simplicité d’écriture et son faible coût de calcul. Elle est bien adaptée à la résolution de l’équation d’onde. La résolution dans le domaine temporel permet en outre de résoudre les hautes fréquences. Cependant, elle est limitée par la géométrie des domaines de calculs et à des conditions aux limites et initiales simples. En particulier, elle est moins pertinente lorsque les conditions aux limites dépendent de la fréquence ou lorsqu’une structure est par exemple couplée au domaine acoustique. On lui préfère alors la méthode des éléments finis (EF).
Exemples de travaux de la littérature
La méthode des différences finies 3D couplée à des conditions aux limites absorbantes diverses a été utilisée pour calculer fonction de transfert relative à la tête (HRTF) pour un modèle de tête sphérique excitée par une source ponctuelle ou une onde plane, de tête artificielle (KEMAR) supposée rigide (Xiao et Liu, 2003) et de tête artificielle (Taro) en prenant en compte le canal auditif (ouvert) et la présence d’une sonde microphonique dans ce canal Nakazawa et Nishikita (Nakazawa et Nishikita, 2005).
Les travaux de Bockstael et al. (Bockstael et al., 2008, 2009) ont porté sur le calcul de la fonction de transfert entre la pression à l’intérieur du canal auditif occlus par un bouchon moulé et la pression au niveau du tympan par différences finies. Le bouchon moulé comporte deux orifices, l’un servant le rôle de filtre acoustique et l’autre instrumenté par un microphone miniature. L’effet de l’oreille moyenne et interne est pris en compte par le modèle à constantes localisées de Kringelbotn (Kringlebotn, 1988), i.e en le représentant par un filtre digital. Le bouchon est modélisé côté excitation comme une impédance purement résistive et côté canal auditif comme une impédance complexe de type constantes localisées qui est reformulée dans le domaine temporel pour la résolution (Botteldooren, 1995). Une approximation de filtre digital est utilisée pour représenter les effets viscothermiques dans les orifices traversant le bouchon.
Méthode des éléments finis
Principe
L’idée de base de la méthode des EF est de discrétiser (ou mailler) les domaines géométriques continus dans lesquels des équations aux dérivées partielles sont satisfaites en petits sous-domaines élémentaires appelés « éléments » sur lesquels les champs acoustiques et de déplacement varient de façon polynomiale en fonction des valeurs de ces champs en différents points de l’élément, appelés « nœuds » du maillage. La méthode des EF opère sur une formulation intégrale des équations aux dérivées partielles appelée formulation faible. Cette formulation faible est construite en intégrant sur les volumes des domaines les résidus des opérateurs différentiels pondérés par des fonctions tests admissibles[18]. En utilisant des intégrations par partie, on obtient la formulation faible qui abaisse l’ordre maximum de différenciation de la solution cherchée et satisfait automatiquement certaines conditions aux limites appelées conditions aux limites naturelles. La discrétisation de la formulation faible fournit un système d’équations algébriques en termes de valeurs nodales des champs qui peut être résolu avec un algorithme informatique. Cette méthode déterministe est très puissante car elle permet d’envisager des géométries, des cas de charges et des lois de comportement très complexes, des conditions aux limites et d’excitation quelconques. Les champs de déplacements vibratoires et de pression acoustique peuvent être évalués en tout point des domaines.
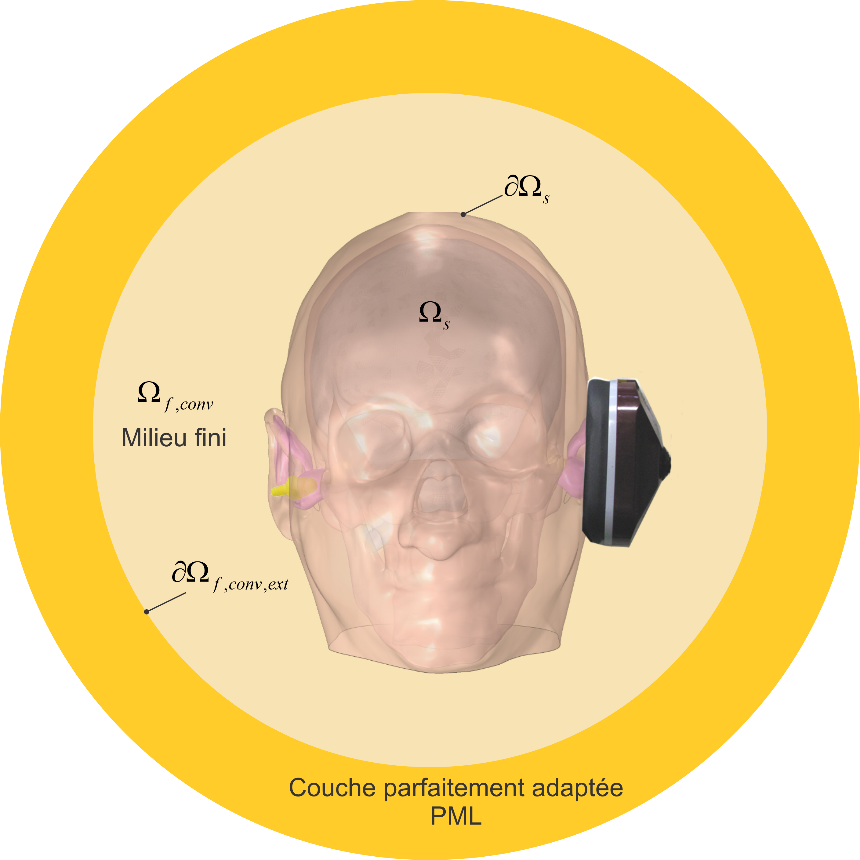
Pour résoudre avec une approche par EF un problème tel que celui présenté sur la Figure 9, où le domaine fluide [latex]\Omega_f[/latex] est infini (problème extérieur), on doit se ramener à un problème intérieur en tronquant [latex]\Omega_f[/latex] afin de pouvoir mailler un volume fini. Ce faisant, il est nécessaire d’appliquer une condition aux limites qui représente au mieux ce qui se passerait si le milieu était infini. En choisissant une troncation convexe de [latex]\Omega_f[/latex] permettant de réduire ce domaine à un milieu fini, l’approche la plus efficace est l’utilisation d’une couche parfaitement adaptée (PML ) (voir Figure 10). Dans cette couche, la pression acoustique satisfait une équation de Helmholtz dissipative qui permet aux ondes de ne pas être réfléchies et de respecter la condition de Sommerfeld. Le traitement numérique de la PML sort cependant du cadre de ce chapitre (voir par exemple (Bériot et al., 2016 ; Bériot et Gabard, 2019) pour la formulation de la PML dans le domaine fréquentiel).
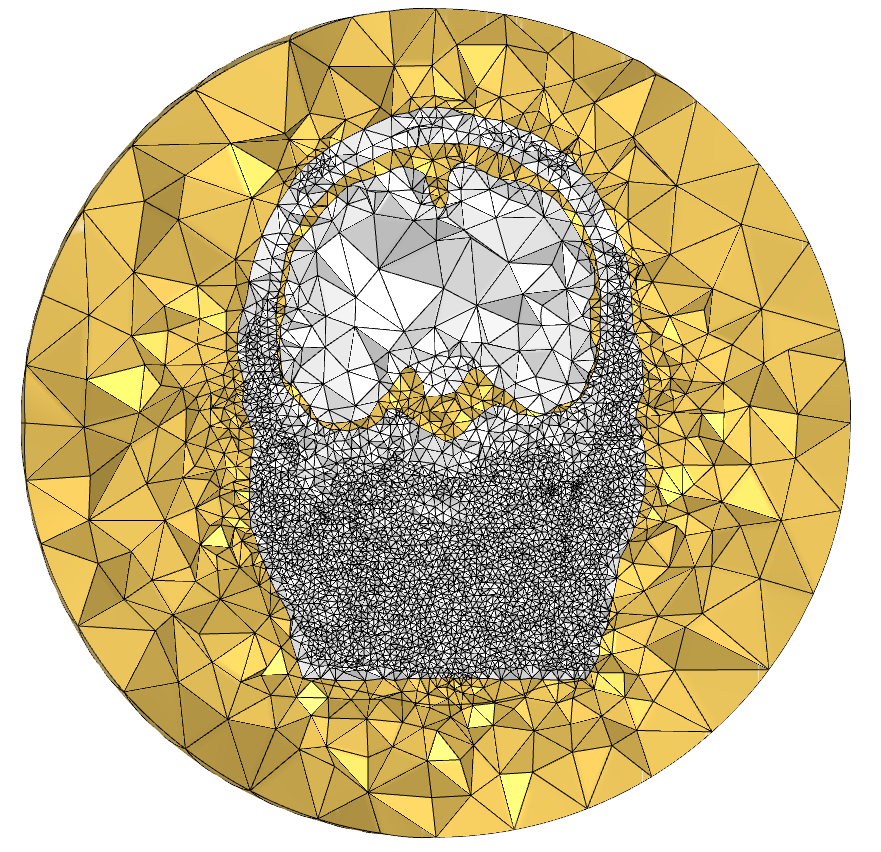
où [latex]\left\{ {\hat u} \right\}[/latex] et [latex]\left\{ {\hat p} \right\}[/latex] sont maintenant des vecteurs contenant les inconnues nodales en déplacement et pression, [latex]\left\{ {\hat F} \right\}[/latex] est le vecteur nodal correspondant à l’excitation solidienne, [latex][K][/latex] et [latex][M][/latex] sont respectivement les matrices de raideur et de masse du domaine solide, [latex][H][/latex] et [latex][Q][/latex] sont des matrices d’énergie cinétique et de compression du domaine fluide. La matrice [latex][C_{up}][/latex]est une matrice de couplage surfacique entre la structure et le fluide. Toutes ces matrices et vecteurs, dont les dimensions dépendent du nombre de degrés de liberté du maillage, sont obtenues en assemblant des matrices et vecteurs élémentaires qui traduisent l’équilibre des variables secondaires (forces dans le cas d’un solide et gradient normal de la pression dans le cas d’un fluide) à l’interface entre chaque élément et la continuité des variables primaires (déplacements dans le cas d’un solide ou pression dans le cas d’un fluide) aux nœuds de chaque élément. La convergence de la solution va dépendre de la discrétisation spatiale adoptée. La Figure 11 illustre un exemple de maillage volumique des différents domaines.
Dans cette section la méthodologie pour traiter le problème extérieur de la Figure 9 par éléments finis a été présentée et l’approche a été détaillée dans le cas d’un problème intérieur. De façon alternative, on peut utiliser des techniques hybrides combinant éléments finis pour les domaines solides et éléments finis de frontière pour les domaines fluides (Atalla et Sgard, 2015). Cette dernière approche est discutée dans la section Méthode des éléments finis de frontière.
Exemples de travaux de la littérature
Des modèles d’oreille externe consistant en un canal de forme réaliste ou simplifiée, rempli d’air, intégrant éventuellement le pavillon et une partie extérieure de la tête, et représentant l’effet acoustique de l’oreille moyenne par une impédance à réaction localisée, ont été développés incluant la présence de tissus environnants (tissus mous, os, cartilage) (Benacchio et al., 2020b ; Brummund et al., 2014, 2015 ; Carillo et al., 2020a ; Sgard et al., 2019 ; Viallet et al., 2014, 2015) ou non (Fadaei et al., 2015 ; Viallet et al., 2013) dans l’optique de calculer le niveau sonore dans le canal auditif. De nombreux travaux existent sur la modélisation par EF de l’oreille moyenne (membrane tympanique, chaine ossiculaire, cavité oreille moyenne) éventuellement couplée à l’oreille externe et à l’oreille interne. On donne ici quelques exemples de ces travaux. Certains d’entre eux ne tiennent pas compte des tissus environnants et visent à étudier (i) la transmission du son dans l’appareil auditif (Gan et al., 2007 ; Koike et al., 2002 ; Lee et al., 2010 ; Nie et al., 2011 ; Volandri et al., 2014 ; Wang et al., 2014) (ii) la détermination de l’impédance dans le canal auditif (Sackmann et al., 2020 ; Schmidt, 2009 ; Schmidt et Hudde, 2009) (iii) la biomécanique de l’oreille moyenne (Caminos et al., 2015 ; De Greef et al., 2017 ; Ferrazzini, 2003 ; Lee et Ahn, 2015 ; Liu et al., 2009 ; Sun et al., 2002, p. 20 ; Volandri et al., 2011) (iv) l’effet de prothèses ossiculaires sur la réponse de l’oreille moyenne (Prendergast et al., 1999 ; Tian et al., 2015), (v) la réponse vibroacoustique de la cochlée incluant les effets de pathologies et d’implants sur cette réponse (Kikidis et al., 2014 ; Ni, 2012). D’autres études considèrent la présence des tissus environnants dans le but d’estimer l’impédance tympanique pour évaluer la condition de l’oreille moyenne (Motallebzadeh et al., 2016, 2017b). Tous ces travaux ne considèrent pas le couplage de l’appareil auditif avec la tête ou alors seulement avec une portion de cette dernière.
Des modèles EF de crânes humains (Kim et al., 2014 ; O’Brien et Liu, 2005 ; Tse et al., 2015) ont été conçus pour étudier le comportement vibratoire de la tête (Tse et al., 2015), la propagation du son par conduction osseuse (Kim et al., 2014 ) ou les formes d’onde de la pression acoustique diffractée par le crâne (O’Brien et Liu, 2005) mais ne s’intéressent pas au système auditif. Plusieurs articles incluent la conduction solidienne à travers les tissus de la tête. Dans le but d’analyser les mécanismes de conduction osseuse, des auteurs ont conçu des modèles EF d’une tête humaine idéalisée (sphère) (Gatto, 2012 ; Gatto et Demkowicz, 2013) ou réaliste incluant l’oreille externe seule (Chang et al., 2016 ; Krysl et al., 2008 ; Xu et al., 2021, 2022) ou le système auditif complet (Taschke et Hudde, 2006), excité mécaniquement ou acoustiquement.
Des modèles numériques EF ont été proposés pour décrire le comportement vibroacoustique en régime stationnaire ou impulsionnel de coquilles (Lee et al., 1995 ; Vergara et al., 2001, 2002 ; Anwar, 2005 ; James, 2006 ; Khani et al., 2007 ; Du et Homma, 2009 ; Sgard et al., 2010b, 2010a ; Vergara et al., 2013 ; Boyer et al., 2015 ; Gaudreau et al., 2017 ; Carillo et al., 2018), de bouchons (Gerges et al., 2000 ; Vergara et al., 2002 ; James, 2006 ; Sgard et al., 2010b ; Viallet et al., 2013, 2014 ; Brummund et al., 2014 ; Sgard et al., 2014 ; Viallet et al., 2015 ; Brummund et al., 2015 ; Sgard et al., 2019 ; Carillo et al., 2020a) ou de systèmes de double protection (James, 2006; Luan et al., 2021a, 2021b, 2022) couplés ou non à une oreille externe de géométrie réaliste ou simplifiée, incluant ou non une portion des tissus environnants, excité acoustiquement ou mécaniquement (effet d’occlusion). Certains auteurs ont considéré l’interaction du protecteur avec la tête complète dans le but de prédire l’atténuation ou l’effet d’occlusion des bouchons (Xu et al., 2021, 2022 ; Sgard et al., 2023), l’effet de l’insertion d’un bouchon dans le canal sur la pression dans la cochlée (Gatto et Demkowicz, 2013), l’effet des paramètres du bouchon sur les déformations et contraintes des parois du canal auditif pour une problématique de confort physique (Baker et al., 2010 ; Norris et al., 2012) et l’efficacité de casques vis-à-vis de la transmission par voie osseuse de bruits impulsifs via l’évaluation de la pression dans le cerveau (Clavier et al., 2010).
Méthode des éléments finis de frontière
Principe
La méthode des éléments finis de frontière est une méthode numérique qui permet de résoudre des équations différentielles dans un domaine, sujettes à des conditions aux limites spécifiques en exprimant la solution sous forme d’intégrales sur les frontières de ce domaine. Ces intégrales font intervenir la valeur de la solution et de sa dérivée normale[19] sur ces frontières ainsi que la solution fondamentale des équations aux dérivées partielles du problème pour une source ponctuelle unitaire placée dans le domaine (appelée fonction de Green) et sa dérivée normale. Les inconnues du problème sont donc transférées au niveau de la frontière du domaine et la dimension du problème est réduite de un. Contrairement à la méthode des EF qui nécessite de discrétiser l’intérieur du domaine, ce sont ici les frontières du domaine qui sont discrétisées en petits éléments sur lesquels les inconnues (par exemple la pression et sa dérivée normale dans le cas d’un problème acoustique) sont approchées par des fonctions simples de type polynomial faisant intervenir les valeurs en certains points (les nœuds), appartenant aux éléments. Ces inconnues sont calculées en appliquant les conditions aux limites et initiales du système.
La méthode des éléments de frontière est intéressante car elle permet de ne mailler que des surfaces plutôt que des volumes. Cependant les matrices à calculer nécessitent des algorithmes d’intégration numérique spéciaux et couteux du fait des singularités de la fonction de Green. Par ailleurs les matrices sont pleines, non symétriques, à valeur complexe et dépendantes de la fréquence. Cela constitue le désavantage principal comparé à la méthode des EF où les matrices sont creuses, symétriques et où la dépendance fréquentielle peut être extraite des matrices notamment dans le cas du problème acoustique intérieur.
Cette méthode est particulièrement appropriée lorsqu’on s’intéresse à déterminer le champ dans un domaine infini. En effet, la condition de Sommerfeld de rayonnement à l’infini est automatiquement satisfaite par la fonction de Green en espace libre et donc seule la surface de l’objet doit être discrétisée. Appliquons la méthode BEM au problème acoustique de la Figure 9b dans le cas de la tête sans protecteur (voir Figure 12a) en régime stationnaire avec une description dans le domaine fréquentiel. On suppose ici que la seule excitation est le monopole d’amplitude [latex]\hat A[/latex] positionnée en un point [latex]\underline x_0[/latex] générant une pression acoustique incidente [latex]\hat p_{inc}[/latex]. [latex]\hat p_{inc}[/latex] est la pression acoustique due à la source lorsqu’il n’y a pas d’objet diffractant dans le volume et est donnée par [latex]\frac{{\hat A\exp \left( { - ik\left| {\underline x - {{\underline x }_0}} \right|} \right)}}{{4\pi \left| {\underline x - {{\underline x }_0}} \right|}}[/latex]. La pression acoustique totale [latex]\hat p[/latex] dans le volume d’air extérieur à [latex]\Omega_s[/latex] est la somme de [latex]\hat p_{inc}[/latex] et de la pression acoustique diffractée par la tête [latex]\hat p_{sc}[/latex]. Cette pression diffractée est elle-même la superposition du champ créé par la présence de la tête (et du protecteur dans le cas de l’oreille occluse) si elle était acoustiquement rigide notée [latex]\hat p_b[/latex] (pression acoustique bloquée) et de celui créé par son rayonnement acoustique du fait d’une vibration possible de sa frontière [latex]\partial\Omega_s[/latex], notée [latex]\hat p_r[/latex]. Dans ce cas, la pression totale [latex]\hat p[/latex] est solution de l’équation intégrale suivante :
où [latex]\hat G(\underline x,\underline y)[/latex] est la fonction de Green[20], [latex]\frac{\partial }{{\partial {n_y}}}\left( . \right) = {\underline \nabla_y}\left( . \right).{\underline n _y}[/latex] désigne la dérivée normale de la quantité entre parenthèse, [latex]{\underline \nabla_y}\left( . \right)[/latex] est le gradient et [latex]\underline n_y[/latex] est la normale extérieure à [latex]\partial \Omega_s[/latex] au point [latex]\underline y[/latex]. Une fonction de Green très utilisée appelée fonction de Green en espace libre s’écrit [latex]\hat G\left( {\underline x ,\underline y } \right) = \frac{{\exp \left( { - ikr} \right)}}{{4\pi r}}[/latex] où [latex]r = \left| {\underline x - \underline y } \right| = \sqrt {\left( {{x_i} - {y_i}} \right)\left( {{x_i} - {y_i}} \right)}[/latex] est la distance euclidienne entre les points [latex]\underline x[/latex] et [latex]\underline y[/latex]. [latex]C^+(\underline x)[/latex] est donné par :
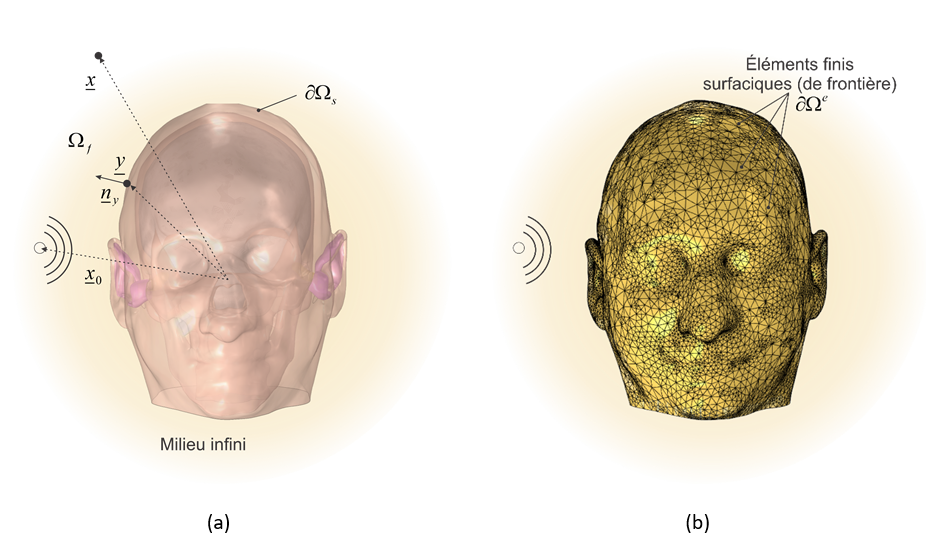
On voit que seule l’enveloppe [latex]\partial\Omega_s[/latex] doit être discrétisée en éléments de frontière. Cette discrétisation de [latex]\partial\Omega_s[/latex] en [latex]N_e[/latex] petits éléments notés [latex]\partial\Omega^e[/latex] permet d’exprimer le second membre de l’équation (1.20) sous la forme d’une somme d’intégrales élémentaires. Pour un problème 3D comme celui auquel on s’intéresse, les éléments sont surfaciques plans ou incurvés en fonction du degré souhaité d’interpolation de la géométrie (voir Figure 12b). Le champ de pression et de sa dérivée normale sont ensuite interpolés sur chaque élément en fonction des valeurs aux nœuds. La détermination du champ de pression acoustique en tout point du volume [latex]\Omega_f[/latex] impose de fixer des conditions aux limites sur [latex]\partial\Omega_s[/latex] (Eq(1.12)). Cette opération peut se faire avec différentes techniques (ex. collocation, variationnelle) (Atalla et Sgard, 2015). Par exemple, dans le cas d’une méthode de collocation, on impose que l’équation discrétisée associée à (1.20) soit satisfaite en chaque nœud du maillage acoustique. En réarrangeant les valeurs nodales de la pression [latex]\hat p[/latex] et de sa dérivée normale dénotée [latex]\hat q[/latex] sur [latex]\partial\Omega_s[/latex] en valeurs connues et inconnues au nombre respectif de [latex]N_p[/latex] et [latex]N_q[/latex], on obtient alors un système matriciel à résoudre du type [latex]\left[ {\hat A\left( \omega \right)} \right]\left\{ {\hat x} \right\} = \left\{ {\hat f\left( \omega \right)} \right\}[/latex]où [latex]\left\{ {\hat x} \right\} = \left\{ {{{\hat p}_1} \ldots {{\hat p}_{{N_p}}},{{\hat q}_1} \ldots {{\hat q}_{{N_q}}}} \right\}[/latex] contient les inconnues nodales et [latex]\left\{ {\hat f\left( \omega \right)} \right\}[/latex] est le vecteur second membre qui tient compte des valeurs connues de [latex]\hat p[/latex] et [latex]\hat q[/latex] sur [latex]\partial\Omega_s[/latex], [latex]\left[ {\hat A\left( \omega \right)} \right][/latex] est la matrice résultant de la discrétisation. Ce système est plein, à valeurs complexes, non symétrique et dépendant de la fréquence.
Exemples de travaux de la littérature
Une grande partie des travaux utilisant la méthode des éléments de frontière en relation avec le problème qui nous intéresse concernent la résolution d’un problème d’acoustique pur. Il s’agit du calcul de la pression acoustique à l’entrée ou dans le canal auditif de l’oreille ouverte en tenant compte des effets de diffraction acoustique par la tête et ce pour une excitation par onde plane acoustique de diverses incidences ou en champ diffus. Cette pression est normalisée par rapport à la pression acoustique qui existerait en champ libre pour fournir la fonction de transfert relative à la tête HRTF. Dans ces calculs la géométrie de la tête est soit idéalisée (ex sphère), soit reconstruite à partir de scans 3D ou IRM de sujets vivants ou de mannequins. Le canal auditif est supposé soit bloqué (Kahana et al., 1999 ; Katz, 2001a, 2001b ; Walsh et Demkowicz, 2003 ; Walsh et al., 2004) soit ouvert (Lee et Ahn, 2014 ; Walsh et al., 2004 ; Walsh et Demkowicz, 2003). Ces auteurs étudient en particulier l’effet sur les HRTF du champ acoustique, de conditions d’impédance pour décrire l’absorption acoustique des cheveux, de la peau et de la membrane tympanique par rapport à une condition rigide, l’effet de la forme du pavillon ou du torse. D’autres auteurs se sont plutôt intéressés à utiliser la méthode des éléments de frontière comme référence pour juger de la validité d’un modèle analytique pour estimer la pression acoustique dans un canal auditif synthétique de forme réaliste terminé par une condition d’impédance représentant l’effet de l’oreille moyenne et excité par un piston plan à l’entrée du canal (Stinson et Daigle, 2005). En ce qui concerne l’oreille occluse, les travaux utilisant la technique des éléments de frontière sont très peu nombreux. Ils portent sur l’atténuation des coquilles en régime stationnaire et transitoire (Lee et al., 1993 ; Mourad et al., 1989) ou sur les effets des modes transverses dans un canal auditif simplifié occlus par une aide auditive, considérée comme rigide acoustiquement (Stinson et Daigle, 2007). Dans ces travaux, le fluide contenu dans la coquille et le canal auditif est modélisé par EF de frontière; la coquille est modélisée par EF et l’aide auditive est considérée rigide acoustiquement.
Filtres linéaires équivalents
Les protecteurs peuvent être modélisés par des filtres linéaires dans le domaine temporel qui caractérisent leur comportement acoustique. Cette méthode nécessite de mesurer l’atténuation du protecteur sur ATF ainsi que le module de la fonction de transfert de l’oreille ouverte. Les filtres sont ensuite construits à partir du produit des deux grandeurs mesurées et d’une reconstruction de phase utilisant la transformée de Hilbert (Vipperman et Murphy, 2006). Cette approche, de type boite noire, gomme la relation avec les paramètres physiques de conception et peut dépendre de l’ATF utilisée.
Bilan
Les sections précédentes ont dressé un portrait des différentes approches pour modéliser la pression acoustique dans le canal auditif ouvert ou occlus par un protecteur. Le Tableau 1 résume ici pour chacune, le domaine d’application recensé dans la littérature ainsi que leurs avantages et limitations pour aborder la problématique précédente. En conclusion, chaque type de modèle peut être judicieusement utilisé en fonction de la problématique considérée, de l’indicateur recherché, de l’effet à étudier et de la gamme de fréquence considérée. Un modèle analytique peut s’avérer suffisant si on s’intéresse au champ de pression acoustique dans le canal auditif ouvert ou à l’atténuation et l’effet d’occlusion de protecteurs en basses fréquences. Si on s’intéresse au champ acoustique extérieur à la tête ou au comportement vibroacoustique d’un protecteur interagissant avec l’appareil auditif en tenant compte de toute la complexité du problème et ce dans une gamme de fréquence relativement large, un modèle numérique sera davantage adapté. Par rapport aux autres modèles, un modèle numérique permet de gagner en réalisme et peut contribuer à mieux comprendre certaines observations expérimentales encore inexpliquées. Il est certain que ce type de modèle est versatile et peut donc être utilisé dans toutes les circonstances. Néanmoins, il est important de souligner que tous ces modèles sont complémentaires et leurs forces peuvent être combinées pour élucider des phénomènes physiques. Les modèles analytiques peuvent être d’une grande utilité pour aider à interpréter les résultats très détaillés des modèles numériques. Inversement ces derniers modèles peuvent aider à alimenter et améliorer les modèles analytiques (Carillo et al., 2020a). Il est crucial de rappeler que tout modèle, avant d’être exploité, doit être calibré et validé avec des mesures expérimentales. Les mesures font partie intégrante du processus de développement et d’amélioration du modèle.
| Approche | Applications | Avantages | Limitations |
| Semi-analytique |
|
|
|
| Matrice de transfert |
|
|
|
| Constantes localisées |
|
|
|
| Filtres linéaires équivalents |
|
|
|
| Différences finies |
|
|
|
| Éléments finis |
|
|
|
| Éléments finis de frontière |
|
|
|
Références
Allard, J.-F. et Atalla, N. (2009). Propagation of sound in porous media: modelling sound absorbing materials (Second Edition). John Wiley and Sons.
Anwar, A. (2005). Low Frequency Finite Element Modeling of Passive Noise Attenuation in Ear Defenders [Master’s thesis, Virginia Polytechnic Institute and State University, USA].
Atalla, N. and Sgard, F. (2015). Finite Element and Boundary Methods in Structural Acoustics and Vibration. CRC Press.
Baker, A. T., Lee, S. et Mayfield, F. (2010). Evaluating Hearing Protection Comfort Through Computer Modeling. Dans Simulia customer conference, 1-15.
Bayarri, M. J., Berger, J. O., Paulo, R., Sacks, J., Cafeo, J. A., Cavendish, J., Lin, C.-H. et Tu, J. (2007). A Framework for Validation of Computer Models. Technometrics, 49(2), 138‑154. https://doi.org/10.1198/004017007000000092
Beisbart, C. et Saam, N. J. (dir.). (2019). Computer Simulation Validation: Fundamental Concepts, Methodological Frameworks, and Philosophical Perspectives. Springer International Publishing. https://doi.org/10.1007/978-3-319-70766-2
Benacchio, S., Sgard, F. et Doutres, O. (2020b). Numerical modeling of the vibro-acoustic behavior of an artificial ear dedicated to the study of hearing protectors. Dans Proceedings of Forum Acusticum, Lyon, France, 3.
Bériot, H. et Gabard, G. (2019). Anisotropic adaptivity of the p-FEM for time-harmonic acoustic wave propagation. Journal of Computational Physics, 378, 234‑256. https://doi.org/10.1016/j.jcp.2018.11.013
Bériot, H., Prinn, A. et Gabard, G. (2016). Efficient implementation of high‐order finite elements for Helmholtz problems. International Journal for Numerical Methods in Engineering, 106(3), 213‑240. https://doi.org/10.1002/nme.5172
Bockstael, A., De Greve, B., Van Renterghem, T., Botteldooren, D., D’Haenens, W., Keppler, H., Maes, L., Philips, B., Swinnen, F. et Vinck, B. (2008). Verifying the attenuation of earplugs in situ: Method validation using artificial head and numerical simulations. The Journal of the Acoustical Society of America, 124(2), 973‑981. https://doi.org/10.1121/1.2945709
Bockstael, A., Van Renterghem, T., Botteldooren, D., D’Haenens, W., Keppler, H., Maes, L., Philips, B., Swinnen, F. et Vinck, B. (2009). Verifying the attenuation of earplugs in situ: method validation on human subjects including individualized numerical simulations. The Journal of the Acoustical Society of America, 125(3), 1479‑1489. https://doi.org/10.1121/1.3075603
Botteldooren, D. (1995). Finite‐difference time‐domain simulation of low‐frequency room acoustic problems. The Journal of the Acoustical Society of America, 98(6), 3302‑3308. https://doi.org/10.1121/1.413817
Boyer, S., Doutres, O., Sgard, F., Laville, F. et Boutin, J. (2015). Low Frequency Finite Element Models of the Acoustical Behavior of Earmuffs. Journal of the Acoustical Society of America, 137(5), 2602‑2613. https://doi.org/10.1121/1.4919326
Brüel & Kjaer. Ear Simulator for Telephonometry Type 4185. Brüel & Kjaer. 2015.
Brummund, M., Sgard, F., Petit, Y. et Laville, F. (2014). Three-dimensional finite element modeling of the human external ear: Simulation study of the bone conduction occlusion effect. The Journal of the Acoustical Society of America, 135(3), 1433‑1444. https://doi.org/10.1121/1.4864484
Brummund, M., Sgard, F., Petit, Y., Laville, F. et Nélisse, H. (2015). An axisymmetric finite element model to study the earplug contribution to the bone conduction occlusion effect. Acta Acustica United with Acustica, 101(4), 775‑788. https://doi.org/10.3813/AAA.918872
Bruneau, M. (2006), Fundamentals of Acoustics, Wiley-ISTE, New York. https://doi.org/10.1002/9780470612439
Buck, K. (2000). Performance of hearing protectors in impulse noise. Dans Proceedings of RTO HFM Lecture Series, Maryland, USA, 11.
Buck, K. (2009). Performance of Different Types of Hearing Protectors Undergoing High-Level Impulse Noise. International Journal of Occupational Safety and Ergonomics, 15(2), 227‑240. https://doi.org/10.1080/10803548.2009.11076804
Caminos, L., Torres, M. et Gonzalez-Herrera, A. (2015). Dynamic behavior of the human tympanic membrane using a viscoelastic model. Dans Proceedings of International Congress on Sound and Vibration, Florence, Italy, 8.
Carillo, K., Doutres, O. et Sgard, F. (2020a). Theoretical investigation of the low frequency fundamental mechanism of the objective occlusion effect induced by bone-conducted stimulation. Journal of the Acoustical Society of America, 147(5), 3476‑3489. https://doi.org/10.1121/10.0001237
Carillo, K., Doutres, O. et Sgard, F. (2021a). Numerical investigation of the earplug contribution to the low frequency occlusion effect induced by bone-conducted stimulation. Journal of the Acoustical Society of America, 150(3), 2006‑2023. https://doi.org/10.1121/10.0006209
Carillo, K., Sgard, F. et Doutres, O. (2018). Numerical study of the broadband vibro-acoustic response of an earmuff. Applied Acoustics, 134, 25‑33. https://doi.org/10.1016/j.apacoust.2017.12.025
Chang, Y., Kim, N. et Stenfelt, S. (2016). The development of a whole-head human finite-element model for simulation of the transmission of bone-conducted sound. The Journal of the Acoustical Society of America, 140(3), 1635‑1651. https://doi.org/10.1121/1.4962443
Cheng, J. T., Ravicz, M., Guignard, J., Furlong, C. et Rosowski, J. J. (2015). The Effect of Ear Canal Orientation on Tympanic Membrane Motion and the Sound Field Near the Tympanic Membrane. Journal of the Association for Research in Otolaryngology: JARO, 16(4), 413‑432. https://doi.org/10.1007/s10162-015-0516-x
Clavier, O. H., Wilbur, J., Dietz, A., Wismer, M. et O’Brien, W. (2010). Development and validation of a computational model of bone-conducted sound transmission for improved hearing protection design. The Journal of the Acoustical Society of America(127), 1986. https://doi.org/10.1121/1.3385117
De Greef, D., Pires, F. et Dirckx, J. J. J. (2017). Effects of model definitions and parameter values in finite element modeling of human middle ear mechanics. Hearing Research, 344, 195‑206. https://doi.org/10.1016/j.heares.2016.11.011
Du, Y. et Homma, K. (2009). Performance of a dual cup-dual cushion earmuff design. Noise Control Engineering Journal, 57(5), 459‑475.
Duda, R. O. et Martens, W. L. (1998). Range dependence of the response of a spherical head model. The Journal of the Acoustical Society of America, 104(5), 3048‑3058. https://doi.org/10.1121/1.423886
Egolf, D. P., Kennedy, W. A. et Larson, V. D. (1992). Occluded-ear simulator with variable acoustic properties. Journal of the Acoustical Society of America, 91(5), 2813‑2823.
Eisner, E. (1967). Complete Solutions of the “Webster” Horn Equation. The Journal of the Acoustical Society of America, 41(4B), 1126‑1146. https://doi.org/10.1121/1.1910444
Fadaei, M., Abouali, O., Emdad, H., Faramarzi, M. et Ahmadi, G. (2015). Numerical simulation of wave propagation in a realistic model of the human external ear. Computer Methods in Biomechanics and Biomedical Engineering, 18(16), 1797‑1810. https://doi.org/10.1080/10255842.2014.974578
Farmer-Fedor, B. L. et Rabbitt, R. D. (2002). Acoustic intensity, impedance and reflection coefficient in the human ear canal. The Journal of the Acoustical Society of America, 112(2), 600‑620. https://doi.org/10.1121/1.1494445
Fedele, P. et Kalb, J. (2015). Level-Dependent Nonlinear Hearing Protector Model in the Auditory Hazard Assessment Algorithm for Humans (ARL-TR-7271). [Research Report, US Army Research Laboratory].
Ferrazzini, M. (2003). Virtual middle ear: a dynamic mathematical model based on the finite element method [Ph.D. thesis, ETH Zurich, Switzerland]. https://doi.org/10.3929/ETHZ-A-004624384
Gan, R. Z., Reeves, B. P. et Wang, X. (2007). Modeling of Sound Transmission from Ear Canal to Cochlea. Annals of Biomedical Engineering, 35(12), 2180‑2195. https://doi.org/10.1007/s10439-007-9366-y
Gardner, M. B. et Hawley, M. S.. (1972). Network Representation Of The External Ear. The Journal of the Acoustical Society of America, 52(6 part 2), 1620-1628.
Gatto, P. (2012). Modeling bone conduction of sound in the human head using hp-finite elements [Ph.D. thesis, University of Austin, USA].
Gatto, P. et Demkowicz, L. (2013). Modeling bone conduction of sound in the human head: II. Simulation results. Journal of Computational Acoustics, 21(04), 1350013. https://doi.org/10.1142/S0218396X13500136
Gaudreau, M.-A., Sgard, F., Laville, F. et Nélisse, H. (2017). A finite element model to improve noise reduction based attenuation measurement of earmuffs in a directional sound field. Applied Acoustics, 119, 66‑77. https://doi.org/10.1016/j.apacoust.2016.12.003
Gerges, S. N., Vergara, F. et Birch, R. S. (2000). Finite element method (FEM) model for the hearing protector noise attenuation for impulsive noise. Dans Proceedings of Internoise, Nice, France, 4.
Gorman, A. G. (1982). New design concepts in personal hearing protectors. Dans P. W. Alberti (dir.), Personal Hearing Protection in Industry (Raven Press Books, Ltd).
Hahn. K. S. (1985). The Effect of Variation in Ear Canal Skin Parameters on the Behavior of an Ear-Earplug Model. [Ph.D. thesis, University of Toronto, Canada].
Hansen, M. O. (1998). Occlusion effects – Part II-A study of the occlusion effect mechanism and the influence of the earmould properties [Ph.D. thesis, Department of Acoustic Technology, Technical University of Denmark, Denmark].
Hiipakka, M. (2008). Measurement apparatus and modelling techniques of ear canal acoustics [Master’s thesis, Helsinki University of Technology, Finland].
Hiselius, P. (2004). Method to Assess Acoustical Two-Port Properties of Earplugs. Acta Acustica united with Acustica, 90, 137‑151.
Hiselius, P. (2005). Attenuation of Earplugs – Objective Predictions Compared to Subjective REAT Measurements. Acta Acustica united with Acustica, 91, 764‑770.
Hiselius, P. (2006). Acoustic modelling of earplugs. Acta Acustica, 92, 135‑138.
Hudde, H. (1983). Estimation of the area function of human ear canals by sound pressure measurements. The Journal of the Acoustical Society of America, 73(1), 24‑31. https://doi.org/10.1121/1.388857
Hudde, H. et Engel, A. (1998a). Measuring and modeling basic properties of the human middle ear and ear canal. Part I: Model structure and measuring techniques. Acustica – Acta Acustica, 84, 720‑738.
Hudde, H. et Engel, A. (1998b). Measuring and modeling basic properties of the human middle ear and ear canal. Part II: Ear canal, middle ear cavities, eardrum and ossicles. Acustica – Acta Acustica, 84, 894‑913.
Hudde, H. et Engel, A. (1998c). Measuring and modeling basic properties of the human middle ear and ear canal. Part III: Eardrum impedances, transfer functions and model calculations. Acustica – Acta Acustica, 84, 1091‑1109.
IEC 60318-4. (2010). Electroacoustics – Simulators of human head and ear – Part 4: Occluded-ear simulator for the measurement of earphones coupled to the ear by means of ear inserts [Standard]. International Electrotechnical Commission.
James, C. (2006). Finite Element Modeling and Exploration of Double Hearing Protection Systems [Master thesis, Virginia Polytechnic Institute and State University, USA].
Kahana, Y., Nelson, P. A., Petyt, M. et Choi, S. (1999). Numerical Modelling of the transfert functions of a dummy-head and of the external ear. AES 16th International Conference 330‑345.
Kalb, J. (2010). A hearing protector model for predicting impulsive noise hazard. The Journal of the Acoustical Society of America, 127(3), 1879‑1879. https://doi.org/10.1121/1.3384578
Kalb, J. T. (2013). An Electroacoustic Hearing Protector Simulator That Accurately Predicts Pressure Levels in the Ear Based on Standard Performance Metrics (ARL-TR-6562) [Research Report, Army Research Laboratory].
Katz, B. F. G. (2001a). Boundary element method calculation of individual head-related transfer function. I. Rigid model calculation. The Journal of the Acoustical Society of America, 110(5), 2440‑2448. https://doi.org/10.1121/1.1412441
Katz, B. F. G. (2001b). Boundary element method calculation of individual head-related transfer function. II. Impedance effects and comparisons to real measurements. The Journal of the Acoustical Society of America, 110(5), 2449‑2455. https://doi.org/10.1121/1.1412441
Kersten, S., Sgard, F. et Vorlander, M. (2024). Impact of the ear canal motion on the impedance boundary conditions in models of the occlusion effect. Journal of the Acoustical Society of America, 155(1), 56‑67. https://doi.org/10.1121/10.0024244
Khani, M., Riyad, K. et Soulaïmini, A. (2007). Finite element analysis of an earmuff-earcanal system. Canadian Acoustics, 35(3), 66‑67.
Khanna, S. M. et Stinson, M. R. (1985). Specification of the acoustical input to the ear at high frequencies. The Journal of the Acoustical Society of America, 77(2), 577‑589. https://doi.org/10.1121/1.391876
Kikidis, D., Bibas, A., Kikidis, D. et Bibas, A. (2014). A Clinically Oriented Introduction and Review on Finite Element Models of the Human Cochlea. BioMed Research International, 2014, 1‑8. https://doi.org/10.1155/2014/975070
Kim, N., Chang, Y. et Stenfelt, S. (2014). A Three-Dimensional Finite-Element Model of a Human Dry Skull for Bone-Conduction Hearing. BioMed Research International, 2014, 1‑9. https://doi.org/10.1155/2014/519429
Koike, T., Wada, H. et Kobayashi, T. (2002). Modeling of the human middle ear using the finite-element method. The Journal of the Acoustical Society of America, 111(3), 13.
Kringlebotn, M. (1988). Network model for the human middle ear. Scandinavian audiology, 17, 2, 75‑85. https://doi.org/10.3109/01050398809070695
Krysl, P., Cranford, T. W. et Hildebrand, J. A. (2008). Lagrangian finite element treatment of transient vibration/acoustics of biosolids immersed in fluids. International Journal for Numerical Methods in Engineering, 74(5), 754‑775. https://doi.org/10.1002/nme.2192
Kulik, Y. (2007). Transfer matrix of conical waveguides with any geometric parameters for increased precision in computer modeling. The Journal of the Acoustical Society of America, 122(5), EL179. https://doi.org/10.1121/1.2794865
Lee, C.-F., Chen, P.-R., Lee, W.-J., Chou, Y.-F., Chen, J.-H. et Liu, T.-C. (2010). Computer Aided Modeling of Human Mastoid Cavity Biomechanics Using Finite Element Analysis. EURASIP Journal on Advances in Signal Processing, 2010, 1‑10. https://doi.org/10.1155/2010/203037
Lee, C.-M., Royster, L. H. et Ciskowski, R. D. (1993). Application of a coupled BEM-FEM technique to study earmuff attenuation. Transactions on biomedicine and health, 1, 31‑40. https://doi.org/10.2495/BIO930041
Lee, C.-M., Royster, L. H. et Ciskowski, R. D. (1995). Formulation for an FE and BE coupled problem and its application to the earmuff-earcanal system. Engineering Analysis with Boundary Elements, 16, 305‑315. https://doi.org/10.1016/0955-7997(95)00075-5
Lee, D. and Ahn, T.-S. (2014). A boundary element model for acoustic responses in the ear canal and its statistical validation and updating. Journal of Mechanical Science and Technology, 28, 1203–1217. https://doi.org/10.1007/s12206-013-1150-3
Lee, D. et Ahn, T.-S. (2015). Statistical calibration of a finite element model for human middle ear. Journal of Mechanical Science and Technology, 29(7), 2803‑2815. https://doi.org/10.1007/s12206-015-0609-9
Liu, Y., Li, S. et Sun, X. (2009). Numerical analysis of ossicular chain lesion of human ear. Acta Mechanica Sinica, 25(2), 241‑247. https://doi.org/10.1007/s10409-008-0206-6
Luan, Y., Sgard, F., Benacchio, S., Nélisse, H. et Doutres, O. (2019). A transfer matrix model of the IEC 60318-4 ear simulator: Application to the simulation of earplug insertion loss. Acta Acustica united with Acustica, 105(6), 1258‑1268. https://doi.org/10.3813/AAA.919403
Luan, Y., Sgard, F., Nélisse, H., and Doutres, O. (2022). A finite element model to predict the double hearing protector effect on an in-house acoustic test fixture. The Journal of the Acoustical Society of America, 151(3), 1860–1874. https://doi.org/10.1121/10.0009835
Luan, Y. (2021).Study of sound transmission through a double protection system using the finite element method (in french « Étude de la transmission sonore à travers un système de double protection à l’aide de la méthode des éléments finis ») [Ph.D. thesis, École de Technologie Supérieure, Canada].
Luan, Y., Doutres, O., Nelisse, H., and Sgard, F. (2021). Experimental study of earplug noise reduction in a double hearing protector on an acoustic test fixture, Applied Acoustics, 176, 1–13. https://doi.org/10.1016/j.apacoust.2020.107856
Mapes-Riordan, D. (1991). Horn modeling with conical and cylindrical transmission line elements. Dans Audio Engineering Society Convention 91. Audio Engineering Society. https://www.aes.org/e-lib/browse.cfm?elib=5522
Marburg, S. et Nolte, B. (dir.). (2008). Computational Acoustics of Noise Propagation in Fluids – Finite and Boundary Element Methods. Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-540-77448-8
Motallebzadeh, H., Maftoon, N., Pitaro, J., Funnell, W. R. J. et Daniel, S. J. (2016). Finite-Element Modelling of the Acoustic Input Admittance of the Newborn Ear Canal and Middle Ear. Journal of the Association for Research in Otolaryngology, 18(1), 25‑48. https://doi.org/10.1007/s10162-016-0587-3
Motallebzadeh, H., Maftoon, N., Pitaro, J., Funnell, W. R. J. et Daniel, S. J. (2017b). Fluid-Structure Finite-Element Modelling and Clinical Measurement of the Wideband Acoustic Input Admittance of the Newborn Ear Canal and Middle Ear. Journal of the Association for Research in Otolaryngology, 18(5), 671‑686. https://doi.org/10.1007/s10162-017-0630-z
Mourad, K. M., Royster, L. H. et Ciskowski, R. D. (1989). Using the boundary element method to investigate internal earmuff-earcanal resonances. Dans Advances in Boundary Elements (vol. 2, p. 297‑308). C. A. Brebbia & J. J. Connor.
Murray-Smith, D. J. (2015). Testing and Validation of Computer Simulation Models. Springer International Publishing. https://doi.org/10.1007/978-3-319-15099-4
Nakazawa, M. et Nishikita, A. (2005). Development of sound localization system with tube earphone using human head model with ear canal. IEICE Trans. Fundamentals, E88-A(12), 3584‑3592.
Ni, G. (2012). James, C. (2006). Finite Element Modeling and Exploration of Double Hearing Protection Systems [Master’s thesis, Virginia Polytechnic Institute and State University, USA]. [Ph.D. thesis, University of Southampton].
Nie, X., Liu, H., Huang, X., Tan, J., Xie, X., Yao, W., Rao, Z. et Duan, M. (2011). Finite element model of human ear reconstruction through micro-computer tomography. Acta Oto-laryngologica, 131(3), 269‑276. https://doi.org/10.3109/00016489.2010.542487
Norris, J., Chambers, R., Kattamis, N., Davis, B. et Bieszczad, J. (2012). Effects of custom earplug design parameters on achieved attenuation. Dans Poster presentation at the annual meeting of the National Hearing Conservation Association.
Oberkampf, W. L. et Roy, C. J. (2010). Verification and Validation in Scientific Computing. Cambridge University Press. https://doi.org/10.1017/CBO9780511760396
O’Brien, W. D. et Liu, Y. (2005). Evaluation of Acoustic Propagation Paths into the Human Head (RTO-MP-HFM-123). [Research report, NATO].
Pascal, J., Bourgeade, A., Lagier, M. et Legros, C. (1998). Linear and nonlinear model of the human middle ear. The Journal of the Acoustical Society of America, 104(3), 1509‑1516. https://doi.org/10.1121/1.424363
Paurobally, M. R. et Pan, J. (2000). The mechanisms of passive ear defenders. Applied Acoustics, 60(3), 293‑311.
Pierce, A. D. (1994). Acoustics: an introduction to its physical principles and applications. Published by the Acoustical Society of America through the American Institute of Physics.
Postulat. (2021, 2 novembre). Méthodologie Scientifique… comprendre humblement. Postulat #1.06. https://www.youtube.com/watch?v=DU5EKJ8GbGU
Prendergast, P. J., Ferris, P., Rice, H. J. et Blayney, A. W. (1999). Vibro-Acoustic Modelling of the Outer and Middle Ear Using the Finite-Element Method. Audiology and Neurotology, 4(3‑4), 185‑191. https://doi.org/10.1159/000013839
Rabbitt, R. D. et Holmes, M. H. (1988). Three-dimensional acoustic waves in the ear canal and their interaction with the tympanic membrane. The Journal of the Acoustical Society of America, 83(3), 1064‑1080. https://doi.org/10.1121/1.1494445
Rodrigues, D., Lavergne, T., Olsen, E. S., Fedtke, T., Barham, R., Durocher, J-N. (2015). Methodology of Designing an Occluded Ear Simulator,” Acta Acustica united with Acustica, 101, 1007–1015. https://doi.org/10.3813/AAA.918895
Sackmann, B., Warnholtz, B., Sim, J. H., Burovikhin, D., Dalhoff, E., Eberhard, P. et Lauxmann, M. (2020). Investigation of Tympanic Membrane Influences on Middle-Ear Impedance Measurements and Simulations. Dans A. Kecskeméthy et F. Geu Flores (dir.), Multibody Dynamics 2019 (vol. 53, p. 3‑10). Springer International Publishing. https://doi.org/10.1007/978-3-030-23132-3_1
Schmidt, S. (2009). Finite element simulation of external ear sound fields for the optimization of eardrum related measurements. Logos Verlag.
Schmidt, S. et Hudde, H. (2009). Accuracy of acoustic ear canal impedances: Finite element simulation of measurement methods using a coupling tube. The Journal of the Acoustical Society of America, 125(6), 3819‑3827. https://doi.org/10.1121/1.3125344
Schroeter, J. et Poesselt, C. (1986). The use of acoustical test fixtures for the measurement of hearing protector attenuation. Part II : Modeling the external ear, simulating bone conduction, and comparing test fixture and real-ear data. The Journal of the Acoustical Society of America, 80(2), 505‑527.
Sgard, F., Amichi, K., Nélisse, H., Boutin, J. et Gaudreau, M.-A. (2010a). Prediction of the vibroacoustic response of earmuffs using a coupled finite element/BEM approach. Proceedings of International Congress on Sound and Vibration, Cairo, Egypt, 8.
Sgard, F., Brummund, M., Viallet, G., Boyer, S., Doutres, O., Petit, Y., Nélisse, H., Laville, F. et Boutin, J. (2014). Prediction of airborne and structure borne sound transmission through hearing protectors using FEM. Dans Proceedings of Internoise, Melbourne, Australia, 12.
Sgard, F., Carillo, K. et Doutres, O. (2019). A 2D axisymmetric finite element model to assess the contribution of in-ear hearing protection devices to the objective occlusion effect. Dans Proceedings of Internoise, 259, Madrid, Spain, 2494-2505.
Sgard, F., Nélisse, H., Gaudreau, M.-A., Boutin, J., Voix, J. et Laville, F. (2010b). Étude de la transmission sonore à travers les protecteurs auditifs et application d’une méthode pour évaluer leur efficacité effective en milieu de travail – Partie 2 : Étude préliminaire d’une modélisation des protecteurs auditifs par éléments finis (R-680). [Research report, IRSST], 1-100.
Sgard, F., Xu, H., Carillo, K., Wagnac, E., and De Guise, J. (2023). “Enhanced finite-element model and acoustic test fixture to assess the objective occlusion effect induced by earplugs under bone-conducted stimulation,” Proceedings of Internoise, Chiba, Japan, 12.
Shaw, E. A. G. (1977). Eardrum representation in middle-ear acoustical networks. The Journal of the Acoustical Society of America, 62(1), S 12.
Shaw, E. A. G. et Stinson, M. R. (1981). Network concepts and energy flow in the human middle ear. The Journal of the Acoustical Society of America, 69(1), 43.
Shaw, E. A. G. et Stinson, M. R. (1983). The human external and middle ear: models and concepts. Dans Mechanics of hearing. University Press, 3‑10.
Shaw, E. A. G. et Thiessen, G. J. (1958). Improved Cushion for Ear Defender. The Journal of the Acoustical Society of America, 30(1), 24‑36.
Shaw, E. A. G. et Thiessen, G. J. (1962). Acoustics of circumaural earphones. The Journal of the Acoustical Society of America, 34(9), 1233‑1246.
Sides, J. D. (2004). Low Frequency Modeling and Experimental Validation of Passive Noise Attenuation in Ear Defenders [Master’s thesis, Viriginia Polytechnic Institute and State University, USA].
Stenfelt, S. et Reinfeldt, S. (2007). A model of the occlusion effect with bone-conducted stimulation. International Journal of Audiology, 46(10), 595‑608. https://doi.org/10.1080/14992020701545880
Stinson, M. R. (1985). The spatial distribution of sound pressure within scaled replicas of the human ear canal. The Journal of the Acoustical Society of America, 78(5), 1596‑1602. https://doi.org/10.1121/1.392797
Stinson, M. R. et Daigle, G. A. (2005). Comparison of an analytic horn equation approach and a boundary element method for the calculation of sound fields in the human ear canal. The Journal of the Acoustical Society of America, 118(4), 2405–2411.
Stinson, M. R. et Daigle, G. A. (2007). Transverse pressure distributions in a simple model ear canal occluded by a hearing aid test fixture. The Journal of the Acoustical Society of America, 121(6), 3689‑3702. https://doi.org/10.1121/1.2722214
Stinson, M. R. et Khanna, S. M. (1989). Sound propagation in the ear canal and coupling to the eardrum, with measurements on model systems. The Journal of the Acoustical Society of America, 85(6), 2481‑2491. https://doi.org/10.1121/1.397743
Stinson, M. R. et Khanna, S. M. (1994). Spatial distribution of sound pressure and energy flow in the ear canals of cats. The Journal of the Acoustical Society of America, 96(1), 170‑180. https://doi.org/10.1121/1.410461
Stirnemann, A. (2011). A. Stirnemann: Ein Mittelohrmodell basierend auf 692 der Aussenohr-Transferimpedanz. Dans Proceedings of DAGA, 2.
Sun, Q., Gan, R. Z., Chang, K.-H. et Dormer, K. J. (2002). Computer-integrated finite element modeling of human middle ear. Biomechanics and Modeling in Mechanobiology, 1, 109‑122. https://doi.org/10.1007/s10237-002-0014-z
Taschke, H. et Hudde, H. (2006). A Finite Element Model of the Human Head for Auditory Bone Conduction Simulation. ORL, 68(6), 319‑323. https://doi.org/10.1159/000095273
Tian, J., Zhang, J., Rao, Z., Ta, N. et Xu, L. (2015). Numerical analysis of middle ear pressure effects on performance of implantable hearing devices. Dans Proceedings of International Congress on Sound and Vibration, Florence, Italy, 8.
Tonndorf, J. (1964). Animal experiments in bone conduction: clinical conclusions. Transactions of the American Otological Society, 52, 22‑41. https://doi.org/10.1177/000348946407300308
Tonndorf, J. (1972). Bone Conduction. Dans J. V. Tobias (dir.), Foundations of Modern Auditory Theory (vol. 2, p. 195‑237). Academic Press.
Tse, K. M., Tan, L. B., Lim, S. P. et Lee, H. P. (2015). Conventional and complex modal analyses of a finite element model of human head and neck. Computer Methods in Biomechanics and Biomedical Engineering, 18(9), 961‑973. https://doi.org/10.1080/10255842.2013.864641
Vergara, F., Birch, R. S., Junckes, R. et Gerges, S. N. Y. (2013). Evaluation of earmuff attenuation by finite element method when subject to high-intensity impulsive noise. Dans NTER-NOISE and NOISE-CON Congress and Conference Proceedings 247, Innsbruck, Austria, (8), 687‑694.
Vergara, F., Gerges, S.N.Y., and Birch, R.S. (2001). Evaluation of the Earmuff-Earcanal System Using Finite Element Method for Grazing for Impulsive Noise Incidence.” Dans Proceedings of International Conference on Acoustics, Rome, Italy, 2.
Vergara, F., Gerges, S.N., and Birch, R.S. (2002). Numerical and experimental study of impulsive sound attenuation of an earmuff. Shock and Vibration, 9, 245–251.
Viallet, G., Sgard, F., Laville, F. et Boutin, J. (2013). Axisymmetric versus three-dimensional finite element models for predicting the attenuation of earplugs in rigid walled ear canals. The Journal of the Acoustical Society of America, 134(6), 4470‑4480.
Viallet, G., Sgard, F., Laville, F. et Boutin, J. (2014). A finite element model to predict the sound attenuation of earplugs in an acoustical test fixture. The Journal of the Acoustical Society of America, 136(3), 1269‑1280. http://dx.doi.org/10.1121/1.4890645
Viallet, G., Sgard, F., Laville, F. et Nélisse, H. (2015). Investigation of the variability in earplugs sound attenuation measurements using a finite element model. Applied Acoustics, 89, 333‑344. https://doi.org/10.1016/j.apacoust.2014.10.007
Vipperman, J. S. et Murphy, W. J. (2006). Design of linear time‐domain filters for hearing protector modeling. The Journal of the Acoustical Society of America, 120(5), 3162‑3162. https://doi.org/10.1121/1.4787875
Volandri, G., Carmignani, C., Di Puccio, F. et Forte, P. (2014). Finite Element Formulations Applied to Outer Ear Modeling. Journal of Mechanical Engineering, 60(5), 363‑372. https://doi.org/10.5545/sv-jme.2014.1837
Volandri, G., Di Puccio, F., Forte, P. et Carmignani, C. (2011). Biomechanics of the tympanic membrane. Journal of Biomechanics, 44(7), 1219‑1236. https://doi.org/10.1016/j.jbiomech.2010.12.023
Walsh, T. et Demkowicz, L. (2003). hp Boundary element modeling of the external human auditory system––goal-oriented adaptivity with multiple load vectors. Comput. Methods Appl. Mech. Engrg, 192, 125‑146.
Walsh, T., Demkowicz, L. et Charles, R. (2004). Boundary element modeling of the external human auditory system. The Journal of the Acoustical Society of America, 115(3), 1033‑1043. https://doi.org/10.1121/1.2945709
Wang, X., Wang, L., Zhou, J. et Hu, Y. (2014). Finite element modelling of human auditory periphery including a feed-forward amplification of the cochlea. Computer Methods in Biomechanics and Biomedical Engineering, 17(10), 1096‑1107. https://doi.org/10.1080/10255842.2012.737458
Withnell, R. H. and Gowdy, L. E. (2013). An Analysis of the Acoustic Input Impedance of the Ear. Journal of the Association for Research in Otolaryngology, 14, 611–622. https://doi.org/10.1007/s10162-013-0407-y
Xiao, T. and Liu, Q.H. (2003). Finite difference computation of head-related transfer function for human hearing. The Journal of the Acoustical Society of America, 113, 2434–2441. https://doi.org/10.1121/1.1561495
Xu, H., Sgard, F., Carillo, K., Wagnac, E., and De Guise, J. (2021). Simulation of the objective occlusion effect induced by bone-conducted stimulation using a three-dimensional finite-element model of a human head. The Journal of the Acoustical Society of America, 150(5), 4018–4030. https://doi.org/10.1121/10.0007230
Xu, H. (2022). Prediction of vibroacoustic behavior of a human head wearing earplugs by a finite element method. [Ph.D. thesis, École de Technologie Supérieure, Canada].
Zuercher, J. C. et Burkhard, M. D. (1976, juin). Design and analysis of ear simulators by computer (20022‑2) [Research Report]. KNOWLES ELECTRONICS.
Zurbrügg, T., Stirnemannn, A., Kuster, M. et Lissek, H. (2014). Investigations on the physical factors influencing the ear canal occlusion effect caused by hearing aids. Acta Acustica united with Acustica, 100(3), 527‑536. https://doi.org/10.3813/AAA.918732
Zwislocki, J. (1955). Design and Testing of Earmuffs. The Journal of the Acoustical Society of America, 27(6), 1154‑1163. https://doi.org/10.1121/1.1908149
Zwislocki, J. (1962). Analysis of the middle-ear function. Part I: Input impedance. The Journal of the Acoustical Society of America, 34(9B), 1514-1523.
- Exemple : paramètres de conception du protecteur, conditions environnementales de mesure, positionnement et nombre de micros, etc. ↵
- Il est généralement admis que les données expérimentales utilisées pour calibrer le modèle ne doivent pas être utilisées simultanément avec celles utilisées dans le cadre de la validation du modèle. Dans un cadre de validation Bayesien, cette pratique peut être relaxée en intégrant la distribution a posteriori des paramètres de calibration dans l'évaluation globale des incertitudes (Bayarri et al., 2007). ↵
- Les casques protégeant à la fois l’oreille et la tête pour des bruits très intenses dans des secteurs très spécifiques comme celui de l’armée (ex casques de pilotes d’avion de chasse ou des soldats sur les porte-avions) ne sont pas considérés dans ce chapitre. Les développements proposés peuvent cependant être adaptés à ce type de protecteur. ↵
- Une formulation des équations dans le domaine temporel amène cependant son lot de difficultés car certaines lois de comportement ou conditions aux limites sont plus facilement décrites dans le domaine fréquentiel. ↵
- Transfer matrix method en anglais. On trouve aussi les dénominations « network model », « transmission line », « two-port model». ↵
- Dans le cas de guides d’ondes à section variable (ex guide d’onde conique, pavillon), un modèle d’onde sphérique peut s’avérer mieux adapté et améliorer la convergence de la méthode (Kulik, 2007 ; Mapes-Riordan, 1991). ↵
- Dispositif qui comporte 2 accès (appelés aussi ports), chaque accès comportant deux pôles. Quatre grandeurs physiques caractérisent le quadripôle. En électricité, on utilise la tension aux bornes des deux ports (et en acoustique) et le courant traversant chaque port ( et en acoustique). ↵
- Aussi appelés « 1-port » model en anglais. ↵
- Dans le cas de (Hansen, 1998), le moule de l’aide auditive a également un effet de masse qui affecte l’amplitude de la source de débit dans le canal. ↵
- Attention la masse acoustique n’a pas les mêmes unités que la masse mécanique [latex]M_m[/latex] qui s’exprime en [kg]. On a [latex]{M_a} = M_m/\Sigma^2[/latex]. ↵
- Attention la souplesse acoustique n’a pas les mêmes unités que la souplesse mécanique [latex]C_m[/latex] qui s’exprime en [mN-1]. On a [latex]C_a = C_m\Sigma^2[/latex]. ↵
- Notons que l’atténuation du protecteur est supposée ne pas dépendre de l’impédance tympanique, ce qui est discutable notamment pour les bouchons. ↵
- Mécanique est à prendre ici au sens large puisqu’on considère également l’acoustique comme une branche de la mécanique des fluides. ↵
- Notons que certains tissus de la tête, comme le liquide cérébrospinal, sont plutôt considérés comme des fluides. Dans ces domaines, c’est plutôt l’équation Eq.(1.11) qui est utilisée. ↵
- Calcul direct de la solution [latex]u^{n+1}[/latex] à l’instant [latex]t^{n+1}[/latex] en fonction de [latex]u^{n}[/latex] à l’instant [latex]t^{n}[/latex]. Aucune inversion de matrice ou résolution de système linéaire n’est nécessaire pour le calcul. Ce schéma est le plus simple mais stable sous condition. ↵
- Il est nécessaire de résoudre un système linéaire pour trouver la solution [latex]u^{n+1}[/latex] en fonction de [latex]u^{n}[/latex]. C’est donc plus compliqué mais inconditionnellement stable. ↵
- Un schéma est dit stable si les erreurs (d’arrondi, de troncature,...) ne peuvent pas croître pendant la procédure numérique d’un pas de temps au suivant. ↵
- i.e satisfaisant les conditions aux limites cinématiques. ↵
- C’est ce qu’on appelle la formulation directe. Il existe également une formulation indirecte qui fait intervenir des inconnues auxiliaires appelées potentiels de simple et double couche. ↵
- [latex]\hat G\left( {\underline x ,\underline y } \right)[/latex] est solution de [latex]\left\{ \begin{array}{l} \nabla _y^2\hat G + {k^2}\hat G = - \delta \left( {\underline x - \underline y } \right)\\ {\rm{Conditions \:aux\: limites}} \end{array} \right.[/latex] où [latex]\delta \left( {\underline x - \underline y } \right)[/latex] représente la distribution de Dirac. ↵
- Notons que cette méthode d’éléments de frontière peut également être appliquée aux structures et aux milieux poroélastiques mais dans ce cas le traitement numérique est beaucoup plus lourd du fait que les fonctions de Green deviennent des matrices de Green. ↵
Montage d’essai acoustique (Artificial test fixture)
Perte par insertion (Insertion Loss) [dB]
Effet d’occlusion (occlusion effect) [dB]
Affaiblissement sonore (Noise Reduction) [dB]
Real-Ear-Attenuation-at-Threshold
Méthode des éléments finis (Finite Element Method)
Méthode des éléments finis de frontière (Boundary Element Method)
Éléments finis
Head-Related Transfer Function
Couche parfaitement adaptée (Perfectly Matched Layer)
Imagerie par résonance magnétique
